
従来の複数ロボットがネットワークで接続されたシステムは同一のLANの中に配置されることが多かったですが、最近ではインターネット上の他のサービスとの連携が期待されています。しかし、インターネットでは通信遅延が不可避であり、安定して動作するロボットシステムにするには数多くの課題を解決する必要があります。会津大学では、このようなインターネットを介したロボットシステムをクラウドロボティクスと呼び、とくにソフトウェアとデータの構成、通信プロトコルとミドルウェア、セキュリティなどに注目して研究開発を行っています。本稿では2019年に会津大学で実証実験を行った搬送ロボットシステムを中心に、関連する技術を紹介します。
在庫管理システムと自律移動配送ロボットを連携させたラストワンマイルの自動化
実証実験概要
労働力不足や高齢化問題といった社会課題が顕著に配送業界において、業務の一部をサービスロボットに代行することが有益な手段の一つと考えられています。搬送業務のラストワンマイルの業務プロセスにサービスロボットを組み込んだユースケースを設定し、研究要素の確認を目的とした実証実験を実施しましたので、その内容を紹介します。
運送業界での課題
- 公共交通機関が失われ、輸送能力が極端に低下
- 労働力不足の深刻化(物流、清掃、警備、接客など)
- インターネット通販やECサイトの利用増加に伴い小口配送の増加
ロボットサービスへの期待
- エンタープライズシステムとサービスロボットの連携が容易でない
- 異機種の搬送ロボットによるサービス提供に期待
- 異機種のロボットを統合管理できるエコシステムに期待
実証実験目的
- ロボット統合管理システムとERPシステムとの連携の容易性の確認
- 階層化された地図による自律移動手法の実現性の確認
- ロボット統合管理システムと自律移動ロボット間のデータモデルの確認
実施概要
複数の業務システムと複数の自律移動配送ロボットを連携させた、ラストワンマイル自動化に係る実証実験を以下の内容で実施しました。
二種類の在庫管理システム
二種類の自律移動ロボット
 図A-1: タートルボット3
図A-1: タートルボット3
 図A-2: メガローバー
図A-2: メガローバー
ロボット統合管理システム
場所と期間
会津大学「先端ICTラボ(LICTiA=リクティア)」1F
2019/11/26(火)-11/29(金)
実施体制と役割
TIS株式会社
- ロボットを統合管理および制御するシステムのロボット統合管理システムの開発を担当
- 業務システムと連携し業務シナリオを実現
- ロボットへの状態管理やタスク管理
- ロボットの大局経路計画の実装
会津大学
- 自律移動ロボットのソフトウェアの設計と上位システム(ロボット統合管理システム)と自律移動ロボット間の役割の設計を担当
- 自律移動ロボットの局所経路計画の設計
- 自律移動ロボットの地図表現の設計
- ロボット統合管理システムと自律移動ロボット間のデータモデルの設計
株式会社日本アドシス
- 自律移動ロボットのソフトウェア実装とハードウェア環境設定を担当
- 自律移動ロボット内で使用する地図システムの構築
- 自律移動ロボット内で局所経路計画の実装
- 自律移動ロボット(タートルボット、メガローバ)の走行環境設定
実証実験内容
ロボット統合管理システムによる集中管理
- データモデルやAPIを標準化することにより、異なる業務システムや異なる自律移動ロボットを容易に管理可能
- プラットフォームが仲介し振り分けることで、異なる業務を複数の自律移動ロボットが同時に遂行可能
- プラットフォームが大局的な経路制御を行うことで、自律移動ロボットの衝突やデッドロックを防止
 図A-3:搬送システムのユースケース
図A-3:搬送システムのユースケース
アーキテクチャ
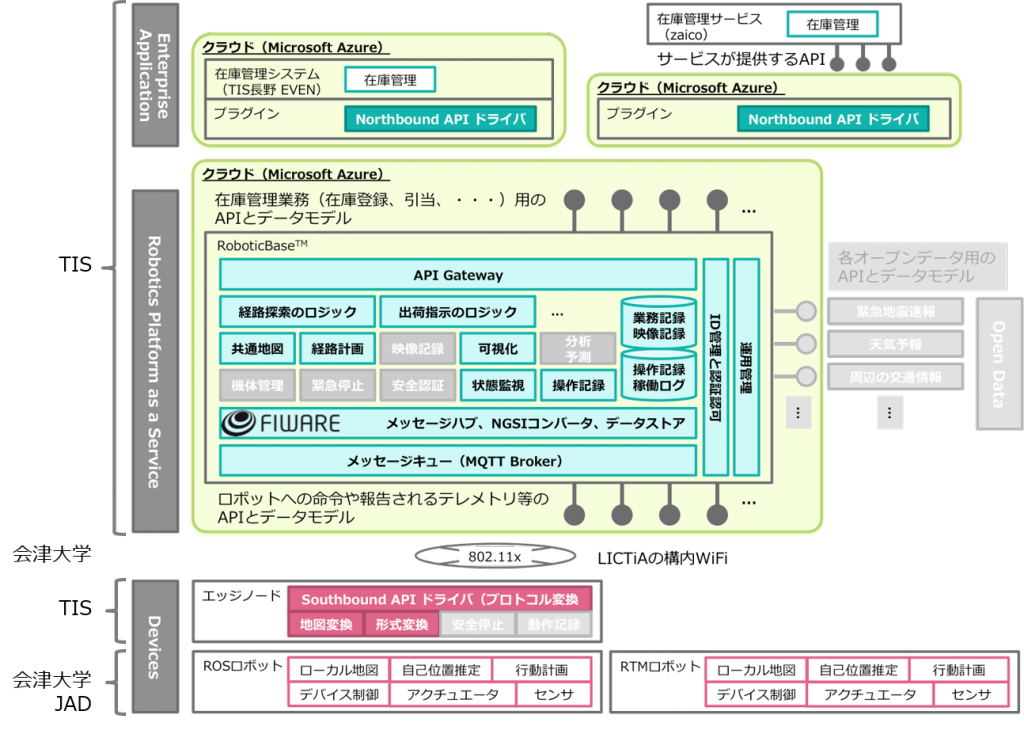 図A-4:搬送システムのアーキテクチャ
図A-4:搬送システムのアーキテクチャ
実証実験結果
実証実験の動画を次に示します。ここでのシナリオは、スマートフォンで荷物の配送をシステムに依頼し、その内容に応じて自動的に集配箇所を回り、目的地に配達するものであり、受け取りのところでQRコードによる認証と確認を行っています。また二台のロボットのすれ違いも実現しています。
在庫管理システムの比較
表A-1:在庫システムの比較
| システム | システム提供形態 | UI | API提供 | 運用管理 | 業務適用 |
|---|
| EVEN | パッケージソフトとして導入 | ある | なし | 自身でシステムの管理が必要 | 業務フローに特化 |
| zaico | クラウドサービスとして提供(月額提供) | ある | あり | サービスなのでシステムの管理は不要 | 自由
カスタマイズ必要 |
参考) TIS長野出展TISと会津大学が自律移動するロボットを活用した搬送業務自動化の実証実験に、TIS長野のソリューション「在庫管理システムEVEN」を活用
URL : <https://www.tis-n.co.jp/news/news-20191223/>
階層化された地図による自律移動手法確立
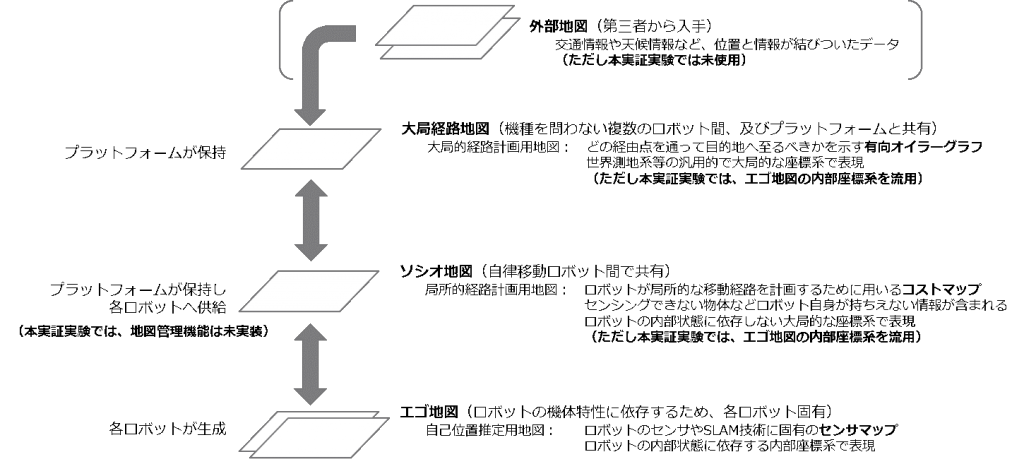 図A-5:経路計画・車両制御と地図の構成
図A-5:経路計画・車両制御と地図の構成
ロボットデータモデルとAPIの標準化 【作成したデータモデル】
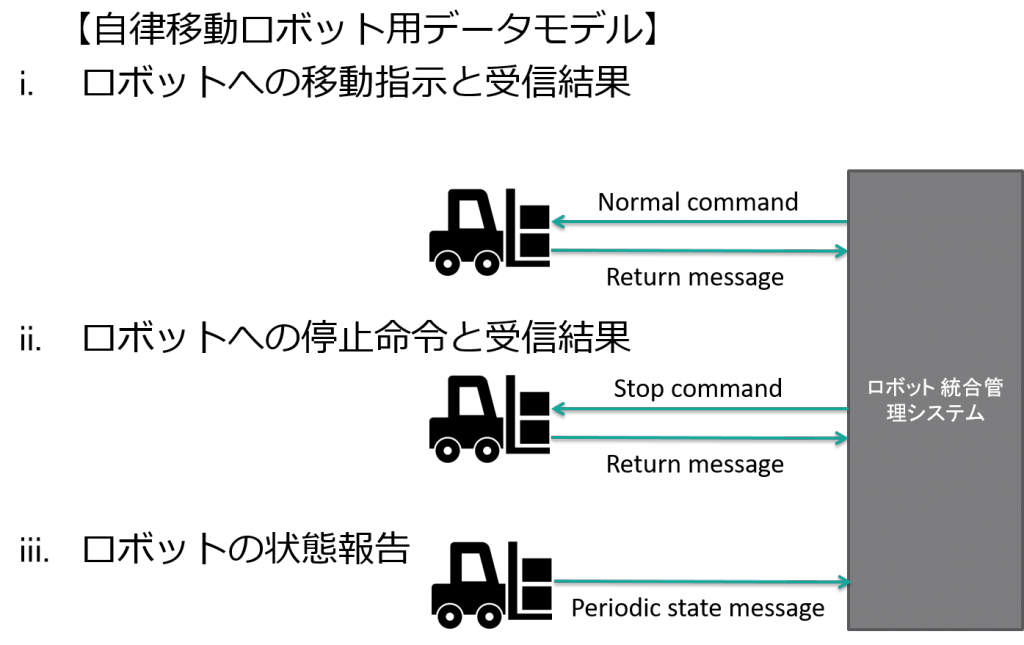 図A-6:自律移動ロボットのデータモデル
図A-6:自律移動ロボットのデータモデル
まとめ
ERPシステム連携
実践できたこと
- ERPシステムと連携する業務シナリオを整理し、「配送ロボットの移動」というタスクを取り出してロボット統合管理システムが提供するAPIとデータモデルに合致する抽象化レイヤを挟むことで、異なるERPシステムの異なる業務シナリオを同一の自律移動配送ロボットに担務させることができました。
- 異なるERPシステムでも問題なく連携することができました。
階層化された地図による自律移動と経路計画
実施できたこと
- ロボットのセンサー(LiDAR)が認識できないガラスの壁等を手動でコストマップに反映することで、ロボット自身が周囲を観測し得ない場所であっても自律的に移動することができました。
- ロボットが倉庫や目的地を巡る大局的経路を有向オイラーグラフとして表現し、単線区間(ロボットが一台しか入れないエリア)を設定してTokenによる閉塞管理を行うことで、ロボット同士の衝突やデッドロックを防止することができました。
標準化したデータモデル
実践したこと
- 自律移動に関するデータモデルを整理し、標準的なデータモデルの案としてFIWARE Foundationや業界団体に提案できました。
- ロボット革命イニシアティブ(RRI)の調査検討委員会に、当データモデルを持ち込み方向性が正しいことを確認できました。
より詳しい実証実験レポートをRTC-Fukushimaのライブラリにて公開しております。
URL: https://rtc-fukushima.jp/technical/3485/
自己位置推定(SLAM)技術とクラウド連携
会津大学 成瀬継太郎、吉野大志、矢口勇一、山田竜平
株式会社日本アドシス
屋内を自律移動し案内や配送を行うサービスロボットシステムを構築する上で、自己位置推定しながら地図を作成するSLAMは必須の技術です。ロボットに搭載されたセンサによって取得できる地図の精度にはばらつきがあり、ガラス壁のようにセンサに映らないものが考慮できないといった課題があります。また、ロボットにより取得された地図は点群データの集合体であり、データ量が大きく、ランドマークの追加・撤去などに柔軟に対応できないといった課題もあります。上位系システム(クラウド)と連携してサービス運用を行うためには、より簡素化された見取り図相当の地図を配し、最小限のデータのやり取りで経路計画と運航状況を連携する仕組みも必要と考えています。
これらの課題の解消を目的として、2019年度、建物内外案内ロボットシステムにおけるSLAMロボットソフトウェアの研究開発と実証実験を行いました。
システム概要
本システム開発では、以下の2つの地図モデルの概念を導入しました。
LIDARセンサにより取得された詳細な3D点群地図は自己位置推定用の地図(以下、エゴ地図)として使用、3D点群地図を2D格子化したものを経路計画用の見取り図(以下、ソシオ地図)として使用します。ソシオ地図はロボット種別に依らず使用する事が可能で、 ロボットに見えない障害物を加えることで、それらを迂回する経路計画を行うことが可能となります。
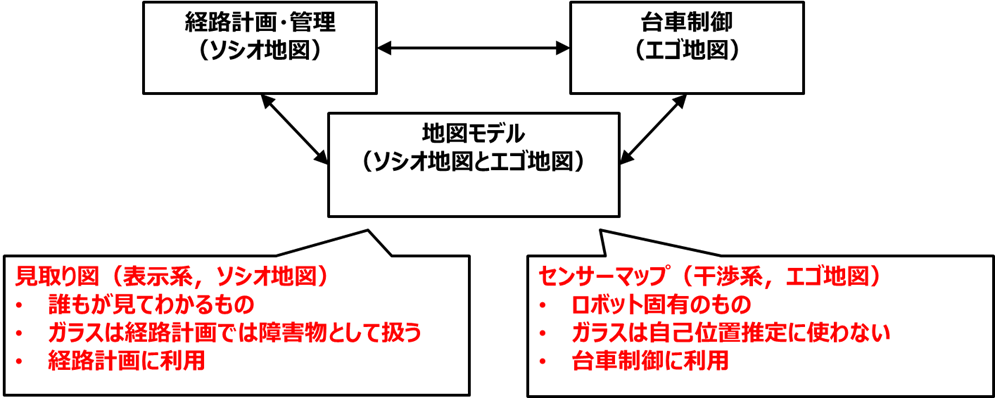 図B-1: 地図モデル
図B-1: 地図モデル
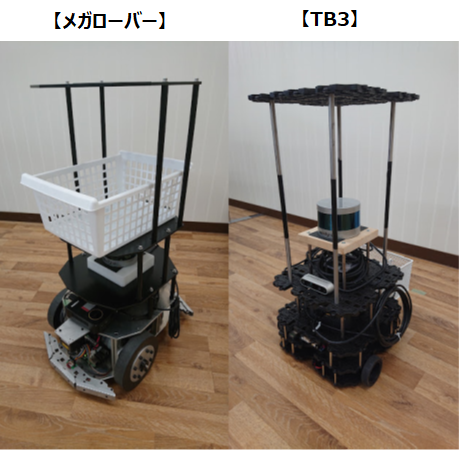 図B-2: 搬送ロボット
図B-2: 搬送ロボット
以下にシステム構成を示します。取得されたエゴ地図をナビゲーションロボットの自己位置推定ノードに連携し、経路計画用に加工されたソシオ地図をナビゲーションノードに連携します。配送システムなどの上位システムからのナビゲーション指示を受け、ロボットが最適経路を選択して自律移動します。
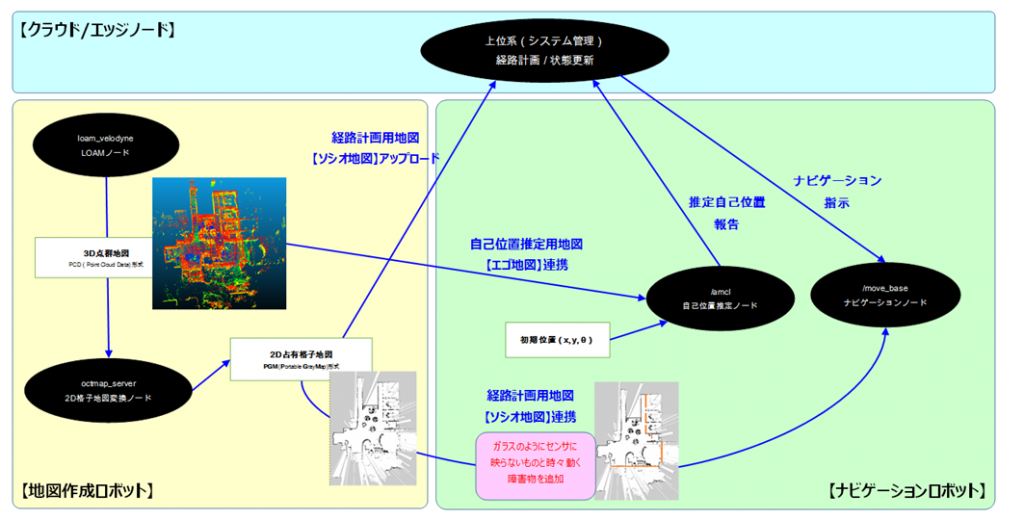 図B-3: システム構成
図B-3: システム構成
搬送ロボットの仕様
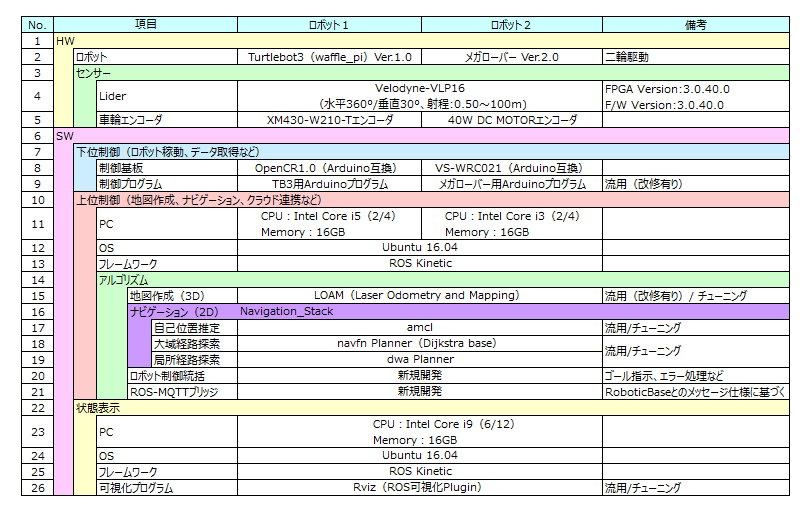
搬送ロボットは研究開発用台車ロボットをベースとしてLIDARセンサ(Velodyne-VLP16)を搭載した構成とし、自己位置を表す情報として、車輪オドメトリとLIDARオドメトリを使用。地図作成/自己位置推定/経路探索アルゴリズムについては、OSSをベースに開発致しました。
 図B-4: ロボットシステム構成
図B-4: ロボットシステム構成
表B-1: ロボット仕様
実証実験
実証実験は、会津大学先端ICTラボ(LICTiA)1Fフロアを使用し、複数の搬送シナリオを準備して行いました。
事前にLICTiA 1FフロアにてLOAMによる3D点群地図を作成し、2D占有格子地図に変換した後にガラスの追加・雑点除去を施して、エゴ地図・ソシオ地図を生成し、搬送ロボットに適用しました。
点群地図【3D】 … LOAMで採取した3D点群地図
エゴ地図【2D】 … センサマップとして、自己位置推定に使用する2D占有格子地図
ソシオ地図【2D】 … 見取り図として、経路探索に使用する2D占有格子地図
 図B-5: 地図生成
図B-5: 地図生成
業務シナリオ実行に際しては、地図上に以下のようなアルファベットで示されるWay Pointを定義し、クラウドノードからWay Point指示を受信し、ロボットを稼動させ、ナビゲーションを行いました。
例:V(初期位置)→L(事務室前)→S(カフェ前)→G(個室前)→H(会議室1前)→H’(会議室1(中))→H(会議室1前)→A(受付前)
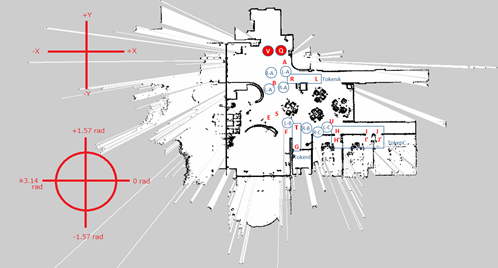 図B-6: ウェイポイントの設定
図B-6: ウェイポイントの設定
 図B-7: 実験の様子
図B-7: 実験の様子
実証実験の結果
エゴ地図/ソシオ地図の導入により、ロボットが見えない障害物を考慮した経路探索を自律的に行うことが確認できた点、2つのセンサデータ(LIDAR+車輪エンコーダ)のみで有人エリアでナビゲーションと障害回避が可能であった点など地図の有効性を確認できました。(メガローバーについては、ハードウェアの設定を主要因とする自己位置消失が頻発しましたが、問題箇所を訂正し、消失が解消されたことを確認しました)。またクラウドノードとの連携面でも移動指示(WayPoint列)とロボットの状態報告のみで伝送データを最低限に抑え、著しい遅延もなく、スムーズに連携できることが確認できました。
クラウドロボティックスの通信技術
OpenRTM-aist ver. 2.0シリアライザによるロボットシステムと異種システムの統合
2019年度の研究成果の一つとして、ロボットミドルウェアの一つであるRTミドルウェアで使用可能な新規シリアライザの開発があげられます。シリアライザとは、ロボットシステム内外で通信する際に必要となる仕様や規約(プロトコル)に則ったデータ表現形式やシリアライズ形式により、ミドルウェア側で扱われるオブジェクトと通信経路側で扱われるバイト列間の相互変換を行うモジュールです。シリアライズはオブジェクトとしてのメモリ上の表現を、データ転送に適したバイト列の表現形式に変換する役目を持ちます。RTミドルウェアのリファレンス実装であるOpenRTM-aistでは、この逆の変換であるデシリアライズ機能も含めてシリアライザという一つのモジュールにまとめられます。
今回新規に開発したシリアライザは2種類で一つはMessagePack(メッセージパック)、もう一つはProtocol Buffers(プロトコルバッファ)と呼ばれるシリアライズフォーマットをベースにしています。MessagePackはデータ構造がシンプルな軽量シリアライズフォーマットで、導入が容易な上に50を超えるプログラミング言語に対応しており柔軟性が高いです。対するProtocol Buffersはインタフェース記述言語としての側面も持ち、異なるプログラミング言語間、特にC言語のような静的型付け言語とPythonのような動的型付け言語間のデータ交換でも強固な型安全を実現します。いずれのシリアライズフォーマットもプロトコルやミドルウェア、プラットフォーム、プログラミング言語からは独立していて、データの相互運用性向上に役立ちます。これらの特性は、MQTT(Message Queuing Telemetry Transport)をはじめとするIoT系プロトコルの持つ特性に適合しており、尚且つMQTTはプロトコル上特にデータ表現形式やシリアライズ形式を定めていないため、実装におけるシリアライズフォーマットの選択は自由となります。このことから今回開発した2つのシリアライザと、同じく我々会津大学が開発したOpenRTM-aist用のMQTT通信インタフェースを組み合わせることで、RTシステム(具体的にはRTシステムを構成するRTコンポーネントの通信ポートの一つであるDataPort)にて、RTシステム側で扱うデータをMQTTによる外部IoTシステム側で扱うデータ表現形式やシリアライズ形式に沿って変換を施すことが可能となります(図1)。
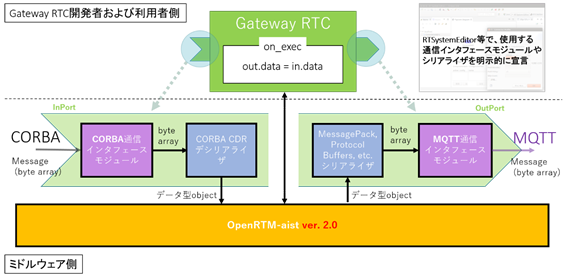 図C-1: OpenRTM-aist ver. 2.0シリアライザによるCORBAからMQTTへの変換Gateway RTコンポーネント
図C-1: OpenRTM-aist ver. 2.0シリアライザによるCORBAからMQTTへの変換Gateway RTコンポーネント
これにより、RTミドルウェアによるIoTシステムの構築のみならず、RTミドルウェアによるロボットシステムと外部IoTシステムの統合や連携の実現も容易になります。RTシステム外部にある既存のシステムを有効活用することで、IoTシステム側で発生したセンサーデータをRTシステム側から直接利用したり、IoTシステム側の知識ベースをRTシステム側から活用したり、逆にRTシステム側で発生したセンサーやアクチュエータのデータをIoTシステム側に送信しデータベースに保管する(図2)、ということも実現できます。
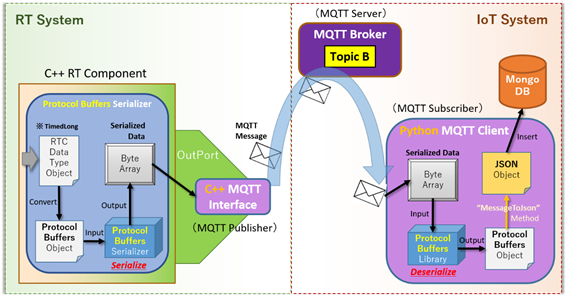 図C-2. OpenRTM-aist ver. 2.0シリアライザによるRTシステムとIoTシステムの連携例
図C-2. OpenRTM-aist ver. 2.0シリアライザによるRTシステムとIoTシステムの連携例
ただし、シリアライザ機能を利用できるようになるのは次期リリース予定のOpenRTM-aist ver. 2.0からであり、現行のver.1.2までは通信インタフェースモジュールからシリアライザが分離されておらず、RTシステムと異種システムの連携は難しいのが現状です。ver.1.2までは、MQTTで構築されたIoTシステムをRTシステム側から再利用することは難しく、IoTシステムをRTシステム側に取り込むには、該当のIoTシステムをRTシステムとして一から構築し直さなければいけません。それがver. 2.0からは資産の再利用が可能となり、システム開発における工数やコストの削減にも寄与します。OpenRTM-aistの開発元である産業技術総合研究所では既にROS(Robot Operating System)やROS2のシリアライザも用意されており、ver. 2.0が正式にリリースされた際にはRTミドルウェアとは異なるロボットミドルウェアによるシステムとの連携もより身近に変わります。すなわち、OpenRTM-aistは次世代バージョンから、あらゆるロボットシステムを連携させるための基盤としての活用が期待されております。これに加えて、今回のMessagePackとProtocol Buffersによる各シリアライザの導入により、IoTというインターネット越しのシステムとの連携基盤とも成り得ます。このことは、複数種類のロボットシステムがインターネットというグローバルなネットワークを通して連携を測ったり、クラウドサービスという共通の資産を利用したりといった、Internet of Robotic Things(IoRT)の思想につながります。今開発したシリアライザを通してロボットのインターネット活用が加速する一要因になれるよう活用を進めていくつもりです。
ロボットネットワークセキュリティ
会津大学 矢口勇一
ネットワンシステムズ株式会社 山崎治郎
背景と目的
クラウドロボティクスでは、ロボットの多様な機能要素が分散化され相互に連携しながら様々な環境の中で様々な用途の仕事を実行します。外部環境から閉ざされていた従来のロボットに比べ、通信手段であるネットワークとそのセキュリティの確保が重要性を増します。会津大学は、ネットワンシステムズ株式会社と共同でロボットネットワークセキュリティの研究開発に取り組んでおります。具体的なシステムを元にしたセキュリティ上の脅威分析・リスク評価を行い、その内容と検討手法を“サービスロボット・セキュリティガイドライン第1版”としてすでに公開し、各方面からのコメントを受け付けております。
(サービスロボット・セキュリティガイドライン公開URL)https://rtc-fukushima.jp/technical/3170/
2019年度の取り組み
2019年度は、ロボットシステムに内在するセキュリティ上の潜在脅威とリスクを顕在化しその影響を実測するための実証を進めました。具体的には株式会社日本アドシス、株式会社TISと会津大学が共同開発した配送ロボットシステムを対象にして、攻撃者がロボットネットワークに侵入し、偽のロボットノードになりすましてロボットノード間の制御情報を傍受し、その内容を書き替えてロボットの動作を狂わせる攻撃のシミュレーションです。通信方式の異なる2パターンの攻撃シナリオを実証し、いずれもロボットの実動作への影響が甚大であることが確認されました。これらの実証により潜在的なセキュリティ上の脅威を顕在化させると同時に、認証やアクセス制限などのセキュリティ対策の有効性・重要性をあらためて認識することができました。
セキュリティ実証試験の概要
・攻撃シナリオ1.ROSノードになりすましての攻撃:偽ロボットノードから偽の歩行速度情報を送りつけることによって、動作中の配送ロボットが暴走する脅威を実測(※動画あり)
・攻撃シナリオ2.MQTTノードになりすましての攻撃:偽ロボットノードから偽の目的地情報を与えることによって、配送ロボットが誤った位置へ移動する影響を実測 (※動画あり)
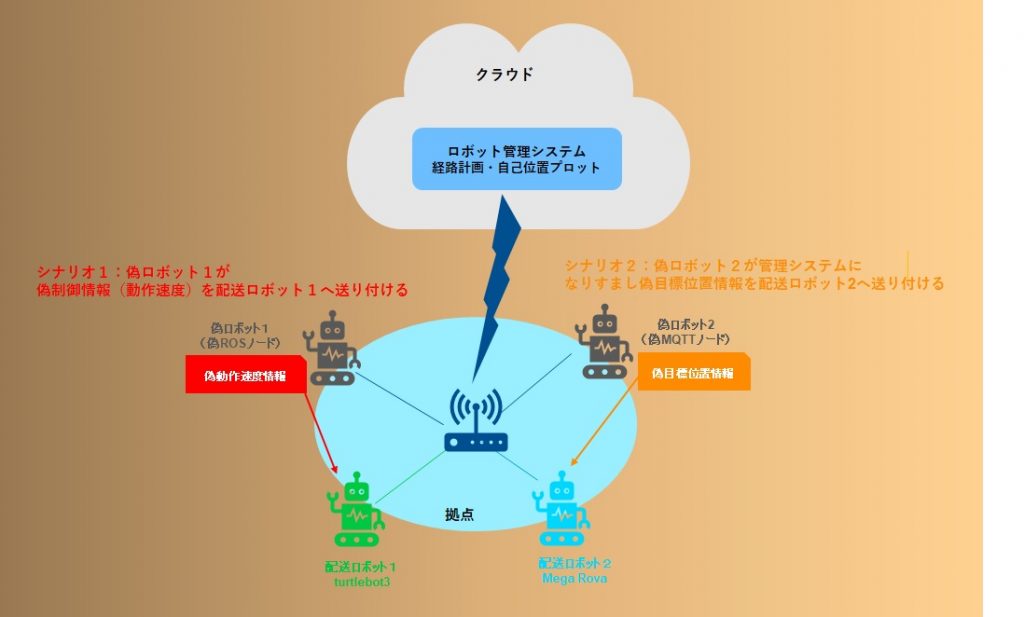 図D-1: セキュリティ攻撃シミュレーション実証 構成図
図D-1: セキュリティ攻撃シミュレーション実証 構成図
 図D-2: 配送ロボット1 Turtlebot3写真
図D-2: 配送ロボット1 Turtlebot3写真
 図D-3: 配送ロボット2 Mega Rova写真
図D-3: 配送ロボット2 Mega Rova写真
 図D-4: 攻撃者操作画面 写真
図D-4: 攻撃者操作画面 写真
今後の課題
サービスロボットのセキュリティについては、標準化等を含めて、他の機関(ロボット革命イニシアティブ協議会など)と強力に連携して推進する予定です。その中で、既存のISO27001系(Cyber SecurityについてはISO27102,27103等)や、制御システムセキュリティ標準IEC62443などの動向を注視しながら、ROSやRTMを用いたサービスロボットのシステム全体のセキュリティのアセスメント等に有用な指標を研究していきたい思っています。
お問い合わせ
会津大学企画連携課
電話:0242-37-2511
Email:cl-innov@u-aizu.ac.jp