
近年多発する自然災害はそれに伴う人的災害など、災害規模が大きくなっており、人が直接作業を行うことが困難な危険作業が多いため、ロボットによる遠隔無人作業が有用となり、災害対応ロボットの需要がますます高くなっています。これまで我々は、産学連携による災害対応ロボットの研究開発における、成果の検証、課題の洗い出しの場として、ロボカップレスキュー実機リーグ、World Robot Summit(以下WRS)に代表される、災害ロボット競技に参加をして参りました。大会における上位入賞のみに主眼を置くのではなく、会津大学の特色であるソフトウェア工学を駆使したロボット制御やロボットシミュレータを活用した新たな知見の獲得、地元企業との産学連携により開発されたロボットの堅牢性や連続稼働性能を、競技参加を通してアピールするとともに、社会実装を見据えた研究開発課題の模索の場と捉え挑戦して参りました。今回はこれまでの開発の歴史を振り返り,最新の開発内容を紹介します。
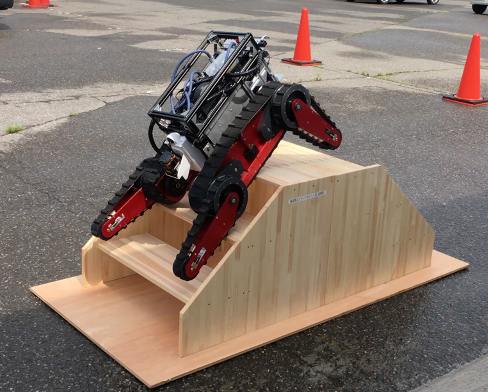
最先端クローラロボット(Spider2020)
最先端クローラロボット(Spider2020)を紹介する前に、これまでの開発歴史を振り返ります。
2016年度
株式会社アイザック社のSpiderをOpenRTM-aistで標準化することにより、PS4コントローラでの制御も容易になりました。
2017年度
OpenRTM-aistで標準化したKinova社のJacoアームを搭載することで、物体の把持ができる災害対応ロボットになりました。

2018年度
ロボットの動作をロボットシミュレータChorenoid上の仮想ロボットで表示することで、初心者でも容易に遠隔操作ができるようになります。また,仮想空間上にコースを作成することで、遠隔操作の訓練が可能になります。
メディア転送ライブラリNDIとの連携することで、ロボットに搭載された複数のカメラの映像をオペレータの伝えることが可能になりました。また、QRコードの読み取りも可能にしました。
グリッパをシリコンゲルで包むことで把持力を向上させ、バルブ開閉動作を容易にしました。

これらの開発を行い、World Robot Summit 2018に挑戦しました。ロボットシステムをスクリプト化することで、スクリプトを1回実行することで、3分以内で遠隔操作可能な状態することができました。また、スクリプトが終了すると、自動的にスクリプト実行前に状態が戻るようにしているため、ロボットシステムにトラブルが起きたとしても、オペレータのみでも短時間にシステムの復旧が可能にしました。ロボット競技会初参加でありましたが、ロボットシステムにトラブルが起きること無く、すべてのミッションで動作することができました。
2019年度
2018年度に開発したロボットシステムの洗練を行いました。
- 映像切り替えスイッチャの実装
- 複数QRコードの読み取り
- 基本システム検査(Readiness Test)に対する実装
この洗練したシステムを用いて、ロボカップ ジャパンオープン 2019 レスキュー実機リーグに挑戦しました。WRS2018での反省を生かし、高性能な遠隔動作支援システムを構築するだけでなく、オペレータの十二分な遠隔操作練習を行いました。また、ルールを熟読し、チームとして最大限得点できるような戦略を取る、および競技参加者全員がスタート前のセットアップの流れを認識することで、コースの当日変更にも対応することができました。結果として、ロボット競技会2回目の参加で決勝に進出することができ、大きな注目を浴びることができました。

これらのロボット競技会挑戦を通じて、地図生成、自動制御がWRS2020の鍵を握ると考えています。
SPIDER2020開発
株式会社アイザックでは、WRS2020災害対応ロボット競技への参加に向けて、大会参加のベース車両となるSPIDER2020の開発を担当しました。アイザック社製小型電動クローラロボット『Giraffe』をベースとし、ロボットアームの搭載・上位PC・カメラシステムの構築における主にハードウェアの開発を実施しました。ベース車両の開発では、競技用のコースに最適化した仕様ではなく、災害対応の現場、プラント点検、除雪・除草などの社会実装を目指した仕様に基づき設計を行なったため、ある部分ではオーバースペックであることもありました。逆に、ロボット競技特有の一部の仕様については対応できなかった部分があり、オペレータの操作難易度が非常に高くなってしまうこともありました。しかし、会津大学や本研究会の参加企業の方々による、シミュレータを用いたロボットやアームの状態を直感的にオペレーターが把握できるシステムや、リアルタイムに複数台のカメラ映像を遅延なく送信するシステム、複数のQRコードを同時に処理する画像処理技術などのソフトウェアの力で、オペレータをサポートすることで、各種競技でのスコアを伸ばしてきました。この成果は、今後の産学連携における研究開発だけでなく、限られたメカのリソースのなかで特定のミッションをソフトウェアの力で達成しなければならない、まさに災害現場などにおいては、非常に有益なものになると考えます。
SPIDER2020概要
ベース車両ハードウェア仕様
寸法 (L×D×H) [mm]:1060×449×382、最低地上高[mm]:30、走行方式:左右独立クローラ駆動 前後進・上下スイング、
補助走行部:4基独立サブクローラ方式(上下スイング)、ベルト駆動方式:チェーンスプロケット駆動、サブクローラトル[Nm]:107
主電源:リチウムイオンバッテリ(25.6V, 512Wh)、稼働時間:2時間、登坂可能斜度:45度(階段)、重量[kg]:72、
通信方式:無線通信 Wi-Fi 2.4GHz/50GHz Bluetooth、段差乗り越え高さ[mm]:200、制御PC:ROCK960 RK3399
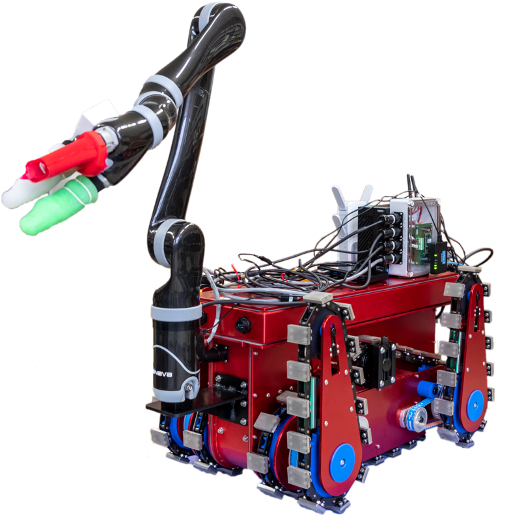
ロボットアーム
ロボット本体より給電し、上位PCより制御
アーム:超軽量多関節ロボットアーム JACO2(KINOVA社製)、動作自由度:6、グリッパ:3指,
本体重量[kg]:5.2、アーム素材:カーボンファイバ
上位PC
ロボットの上位系(ロボットアーム、カメラ、センサ類)の制御を行うPCをベース車両上部に設置
走行系の制御PC・オペレータ操作用PCと通信を行い、ロボット全体の制御を行う
操作側PC
遠隔操作用のロボットの走行する周辺環境のカメラ映像や、ロボットやアームの姿勢状態を伝えるシミュレータ(Choreonoid)の画面を表示
シリコンゲルグリッパ
バルブの開閉やドアの開閉の際に、ロボットハンドとの接点を増大することで、作業難易度を低減します
紹介動画
アナログメータ読み取り自動化
World Robot Summit 2020 インフラ・災害対応カテゴリー 災害対応標準性能評価チャレンジのタスクの1つである「DEX1 メーター/バルブ」で使用されているアナログメータ(JIS B 7505-1準拠ブルドン管圧力計)の自動読み取りについて紹介します。
概要
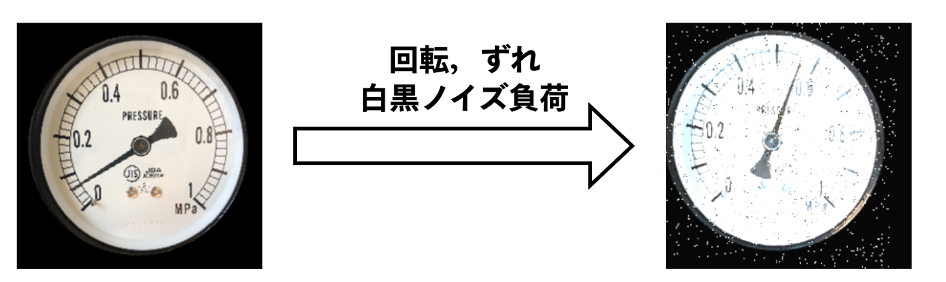
プラントの日常点検では危険箇所が多いため、ロボットによる自動点検の需要が高いです。特に、アナログメータの読み取りが日常点検の一つであることから、他の工場内点検タスクにおうようできるため,Deep Neural Network(DNN)によるアナログメータの自動読み取りを行いました。特に、撮影ノイズを含む学習データを人工的に生成し、これらのデータをDNNの学習に利用しました。学習後のDNNは、読取角度,メータの汚れ,メータの光の反射に対してロバストであり,WRS2020プラント災害予防チャレンジで求められている読み取り絶対誤差0.05以内を達成しました。
学習データの作成
既存研究[1]を参考にして、アナログメータの盤と針を分解して、針の向きを変更した合成画像を作成することで、学習データの作成を行いました。特に、汚れを含んだアナログメータ自動読み取りを行うために、白黑ノイズを学習データに含めました。
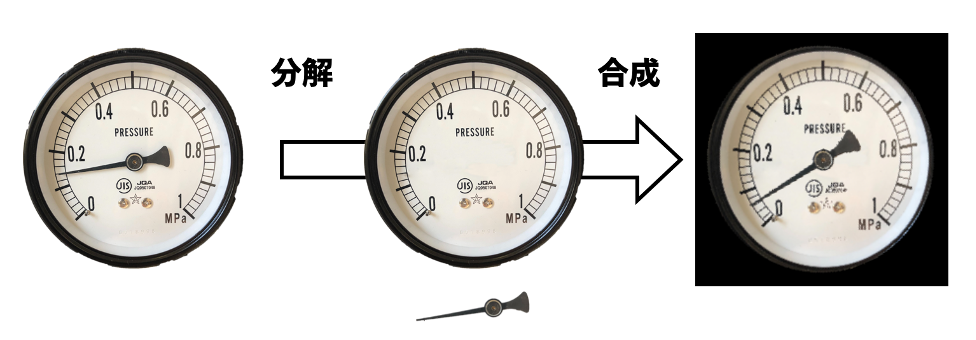
[1] 小西裕一、坪内孝司、大矢晃久、"深層学習による指針の写り方の変化に強い円型アナログメータの読み取り"、第17回計測自動制御学会システムインテグレーション部門講演会、2016年
学習後DNNの特徴
カメラが左右50°傾いた状態において、精度が高いアナログメータ⾃動読み取りが可能になりました。
白黑ノイズを学習データに含めまたことにより、メータの汚れ、メータの光の反射に対してロバスト性を有するアナログメータの読み取りが可能になりました。
紹介動画
今後に向けて
WRS2020で使用するSpider2020にこの成果を搭載して、WRS2020災害対応標準性能評価チャレンジに挑戦する予定です。また、今回は1つのアナログメータに対しての自動読み取りを行いましたが、様々な形状のアナログメータに対応する自動読み取り手法の開発を目指す予定です。
3D地図自動作成
会津大学 成瀬継太郎、Udaka Ayas Manawadu、小川浩明、志々木啓人、矢口勇一、山田竜平
WRSの災害対応ロボット標準性能評価チャレンジにはEXP1と名付けられたタスクがあり、平面や円柱などに広く分布しているQRコードを認識し、その三次元地図を作成することが要求されます。本稿では、そのタスクに対する私たちの取り組みについて説明します。
タスクEXP1と解決すべき課題
タスクEXP1では、ロボットは大小さまざまなQRコードが貼られた複数の壁がある作業空間に置かれ、センサを用いて壁の3次元モデルを生成し、各QRコードに対応した位置にデコードした内容を表示することが要求されます。下の図はWRSのサイトでのタスクの概要説明です。
この課題では、壁の三次元モデル作るために距離センサと、QRコードを認識するために画像センサの情報を統合する必要があります。さらに、小さなQRコードを認識するためには壁の近くにカメラを接近させることになり、様々な位置と向きで撮影します。一方で、距離画像はカメラを中心とした座標系でデータが出力されるため、全体を表す単一の三次元地図を生成するためには、各カメラの位置と向きを考慮して基準となる座標系に変換する必要があります。ここが、このタスクの難しさです。
 https://worldrobotsummit.org/wrs2020/challenge/disaster/standard.html
https://worldrobotsummit.org/wrs2020/challenge/disaster/standard.html
図1:EXP1の概要
私たちの手法
このタスクに対して、私たちは以下の手法で取り組んでいます。
(1) ロボットアームの先端にRGB-Dカメラを取り付け、アームを動かしながら、全体をカバーするように複数の距離画像(Point Cloud Data形式として)を撮影する。
(2) 各距離画像の撮影するときに、カメラ、すなわちアームの先端の位置と向きを記録する。
(3) 各カメラの位置から基準座標系への変換行列を生成し、各距離画像を基準座標系へ変換し、マージする。
図2にこの原理を示します。
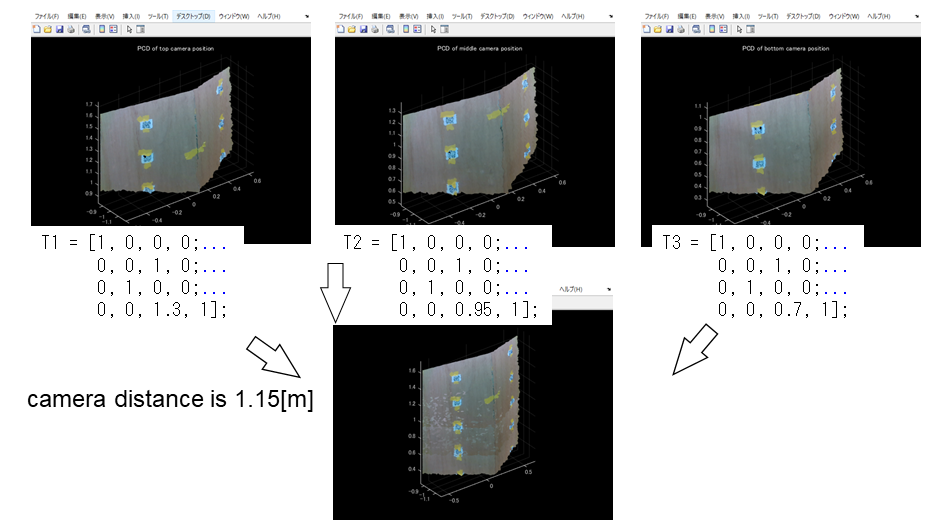 図2:距離画像の統合の原理
図2:距離画像の統合の原理
三次元地図生成の例
私たちが作成した三次元地図の例を示します。図3はアームの先端に取り付けたRGB-Dカメラで距離画像を撮影しているところ、図4は生成された三次元地図です。このように複数の距離画像から全体を表している単一の三次元地図が構成されました。現在は、三次元地図の精度向上と機能拡張に取り組んでいます。
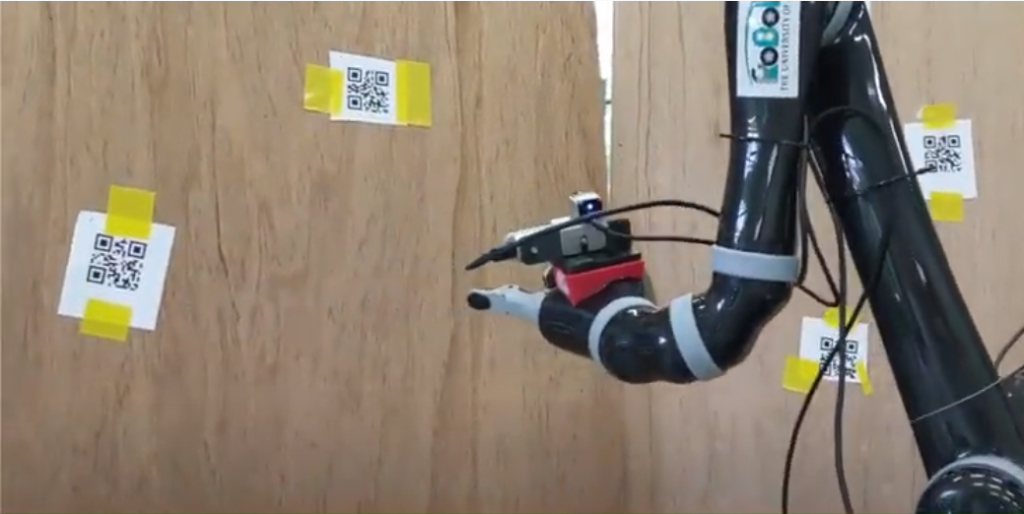 図3:距離画像の撮影の様子
図3:距離画像の撮影の様子
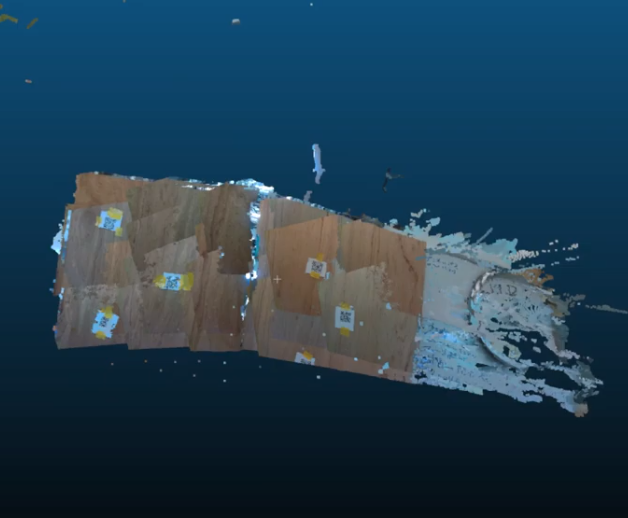 図4:生成された三次元地図
図4:生成された三次元地図
紹介動画
シミュレーション技術
会津大学 渡部有隆、嶋大地、古川智之、成瀬継太郎
株式会社FSK
ロボットの開発、ロボットの操作、ロボットを使った作業の設計や作業者の訓練など、ロボットのあらゆる分野でシミュレータの活用が欠かせないものとなっています。会津大学では、World Robot Summit 2020(以降 WRS2020)のトンネル事故災害対応・復旧チャレンジに参加することで,シミュレータ技術の開発を促進しています。株式会社FSKは会津大学のWRS2020への参加に向けて、システムの構築支援やChoreonoidの技術的支援などを行いながらシミュレータ技術の開発を行っています。また、会津大学は国立研究開発法人 日本原子力研究開発機構(以降、JAEA)とロボットシミュレーションによる災害対応遠隔操作支援技術開発の共同研究を行っており、共同研究で得た技術を活用することでシミュレータ技術の向上を図っています。
システム構築やChoreonoidの技術に関して
WRS2020の要件に準拠したシステム構築を行っています。また、独自のモデルやコントローラなどを作り、タスクへのチャレンジのテストを行っています。モデル作成やコントローラ作成などの技術は、前回のWRS2018でこの部門で優勝した経験を踏襲しながら開発を行っています。また、テスト時に動画の撮影やログの取得を行い、それを分析するなどしながら本番に向けたテストを行っています。
独自のロボットモデル(援竜と呼ばれる会津大学が開発した実際のロボットをシミュレーションで再現したモデル)としては、大きな障害物等を取り扱うことのできるロボットを開発しています。それに、伸縮機能をもった小型カメラ、QR読み取り機能などを組み合わせ、高所点検タスクに対応することができるようなモデルの開発もしています。
※JAEAとの共同研究 令和元年度 第2回ロボットソフトウェア検討会「会津大学・JAEAシミュレーションチームの技術」資料より
https://www.pref.fukushima.lg.jp/sec/32021f/r1-robo-software2.html
WRS2020に向けて
モデル製作・ROS等を利用した制御やオペレータ訓練方法の検証や自律支援、高度な災害対応作業などのプログラミング手法の研究開発を行い、WRS2020の競技会を通じて、研究開発した技術の実証や検証を実施していきます。
ソフトシミュレーション
会津大学 成瀬継太郎
福島コンピューターシステム株式会社
本件は変形する柔軟物体と剛体との間の力学的シミュレーションの実現として、Choreonoid上でAGX Dynamicsを使用し、三次元柔軟物体のクラスをモデル化、剛体モデルとの多体シミュレーションを行えるよう研究を行っております。Choreonoidを含むロボット(多体)シミュレータの現状は、ほとんどが剛体シミュレーションのみで、三次元のモデルが学術的段階で未対応でした。そのため、三次元の柔軟物体モデルとして、X-Y-Zの三方向に結合した弾性体モデルを検討しております。
AGX Dynamicsについて
AGX DynamicsとはスウェーデンのAlgoryx Simulation AB社が開発を行っている商用の物理エンジンです。この物理エンジンを使用することで、Choreonoid上で実現が難しかったクローラーやワイヤーなどのシミュレーションを実現できます。
AGX Dynamicsの詳細は下記をご覧ください。
原理モデルの生成
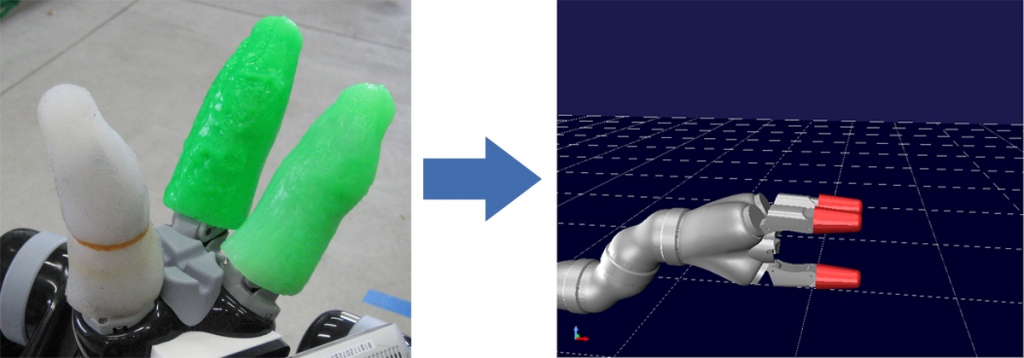
AGX Dynamicsにて提供されるクラスライブラリから柔軟物体の近似モデルを作成しました。ここでは体積をもった柔軟物体を、多数の頂点とそれらをつなぐバネとダンパーの性質をもったワイヤーで接続することで、近似的に表現しています。
紹介動画
今後の目標
今後の目標として、作成した近似モデルを実際のロボットで用いている指サック状に構築し、物体を把持した際の指先の変形が表現できる、よりリアルなシミュレーションの実現を目指しております。
お問い合わせ
会津大学企画連携課
電話:0242-37-2511
Email:cl-innov@u-aizu.ac.jp