こんにちは、東日本計算センターです。
今年で創業59年を迎える当社は、福島県いわき市に本社ならびに「ながとイノベーションセンター」(廃校を活用したR&D施設)を置き、東京/日立/横浜、県内は会津若松市/郡山市にもオフィスを構えています。
近年は、R&Dセンターが中心となり、各事業部と連携して、ロボットやドローン等の研究開発をしています。
ここでは、会津大学との取り組み(産学連携ロボット研究開発支援事業)で研究開発していますロボット・データ・リポジトリ(以下、RDR)と物体認識システムについて紹介します。
 ながとイノベーションセンター
ながとイノベーションセンター
RDR
RDR(ロボット・データ・リポジトリ)は、異種複数ロボットの内界データ、外界データ(※)をクラウド環境上に配置された共有のDBに蓄積し、そのデータが利用できる環境を提供するものです。
以下の図のように、RDRを介してこれらのデータを他のロボットシステムと共有することにより、Cyber-Physical-System(CPS)の研究開発を行っています。
※内界データ:ロボットの関節角度や速度等のデータ
外界データ:ロボットで取得したイメージ、点群、動画等
物体認識システム
物体認識システムは、複数の外部カメラで検出した物体の位置や姿勢を推定し、机や椅子といったレイアウトを監視するシステムです。物体認識システムで推定した位置情報や姿勢情報は、RDRを介してロボットやビューアに提供されます。

実空間で検出した物体を配置したビューア
また、レイアウト監視においては、レイアウトの変更を素早く検出することで、ロボットが走行する2次元格子地図に最新のレイアウト位置を反映させることができます。
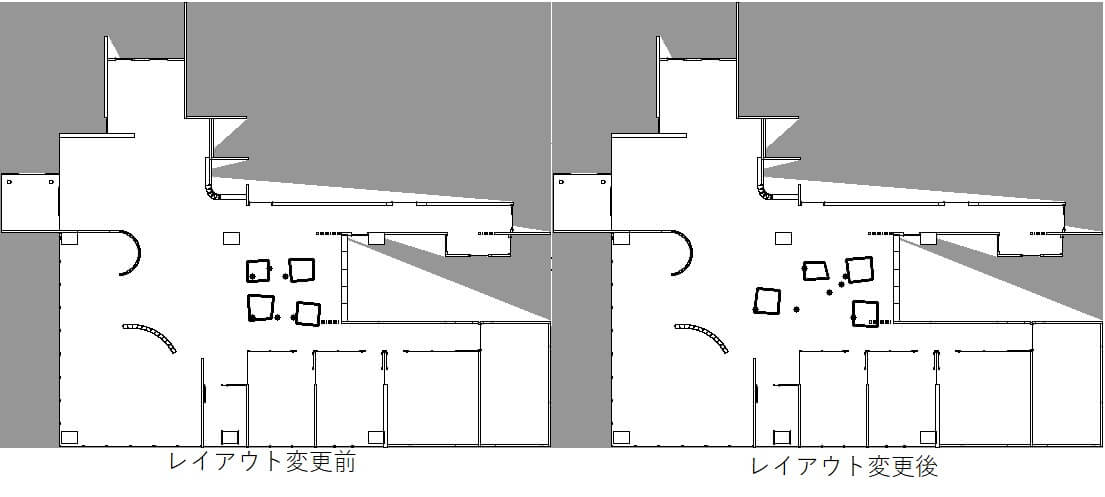
レイアウト変更によって変更された地図
さらに、物体認識の位置精度向上や姿勢推定に、ARマーカーの技術も併用しています。
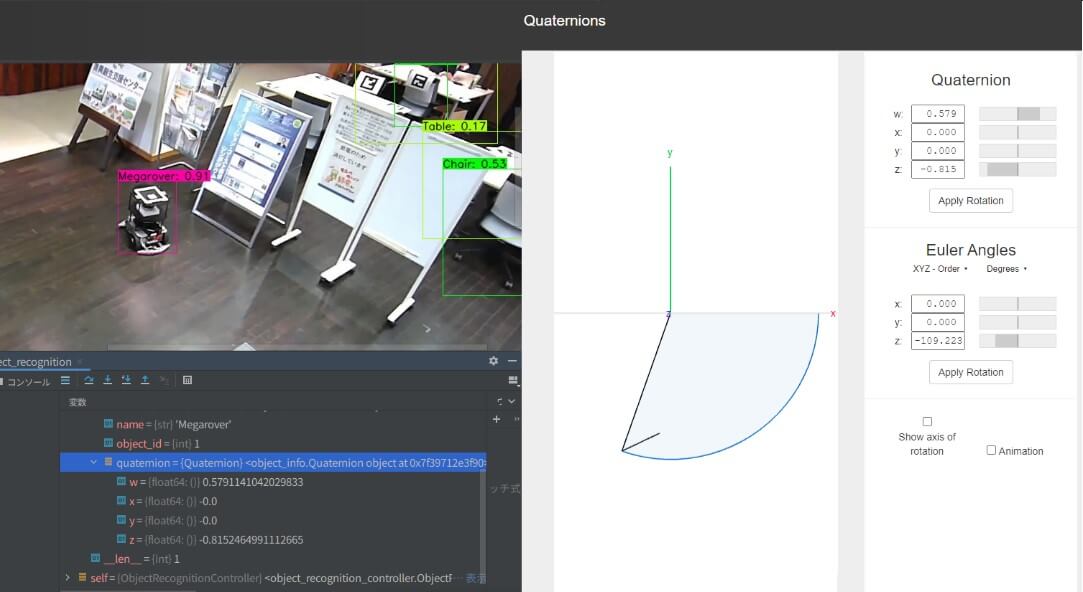
ARマーカーによる搬送ロボットの姿勢推定
今後の取り組み

異種複数のロボットや外部システムとのさらなるデータ連携に向け、蓄積したデータの分析やCPSによるデータ相互利活用(例:現実空間で得た情報を仮想空間で可視化、仮想空間でシミュレートした結果を現実空間にフィードバック)に取り組みます。これらを通して、当社ロボットシステムによるサービス提供を目指します。
最後に
この他にも、当社では、「廃炉に向けたロボット」「風力発電点検ドローン」「宇宙分野に向けたロボットの群制御」等の研究開発をしており、一部のメディアでも取り上げていただいております。事業化に向けて活動しているプロジェクトもありますので、引き続き当社の研究開発にご注目ください。
※東日本計算センター 研究開発事業紹介ページ