OpenRTM-aist用オンラインビジュアライザ
1.概要
福島コンピューターシステム株式会社は、会津大学からの委託を受け、サイバー空間とフィジカル空間の連携を目的とした、「OpenRTM-aist用MQTT通信モジュールを利用したオンラインビジュアライザ」を開発しました。
2.開発内容
会津大学がアイザック社の協力のもと作成した災害対応ロボットのSpider2020の操作履歴データをオンラインによりロボット統合GUIソフトウェアであるシミュレータChoreonoid(コレオノイド)で受信し、実機ロボットの挙動をChoreonoidで再現させました。(図1)
本システムにより、遠隔においてロボットの動作をリアルタイムに確認することができるようになりました。
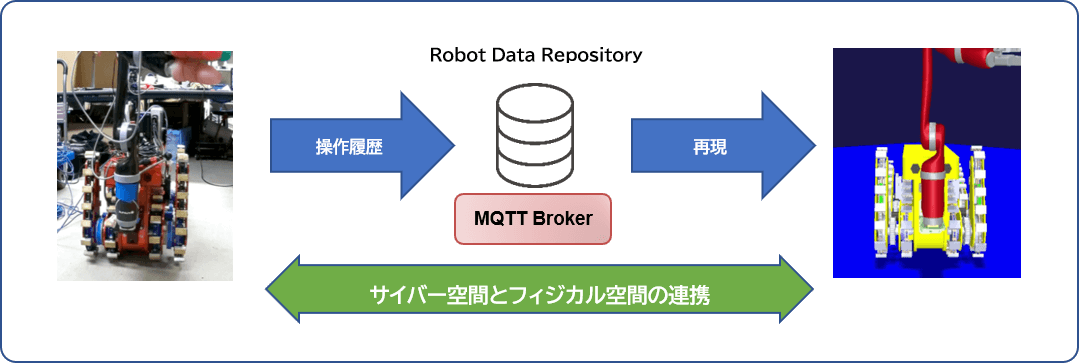
図1.操作履歴データの流れ
オンライン通信は、セキュリティが確保されたOpenRTM-aist用MQTT通信モジュールを利用しました。
通信モジュールは、OpenRTM-aistで開発した機能要素ごとのソフトウェアであるRTコンポーネント(RTC)と連携しています。今回、サブスクライブした送信履歴データをコントロールRTCへ渡すRTCブリッジとロボットモデルを操作するコントロールRTCの2つを開発しました。(図2)
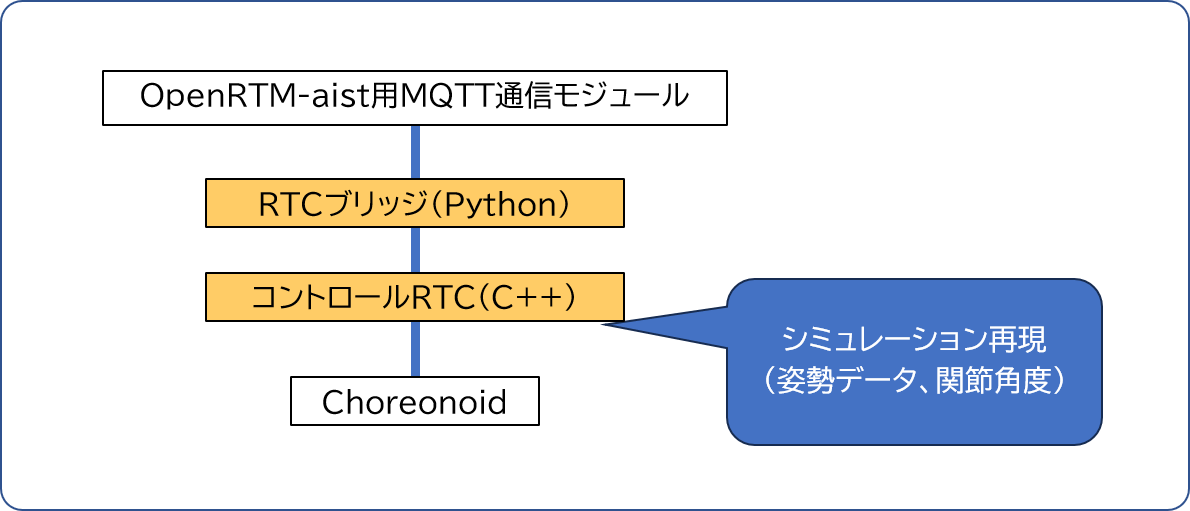
図2. モジュール構成
コントロールRTCでは、図3で示すロボットモデルのシャーシ、クローラ、サブクローラ、アーム、フィンガーの各リンクへ姿勢、関節角度データを与えてシミュレータ上で実機ロボットの挙動を再現しました。

図3.ロボットモデル
実証実験においては、Spider2020の操作履歴データをChoreonoidでサブスクライブし、実機ロボットとシミュレータの動作を比較しました。(図4)
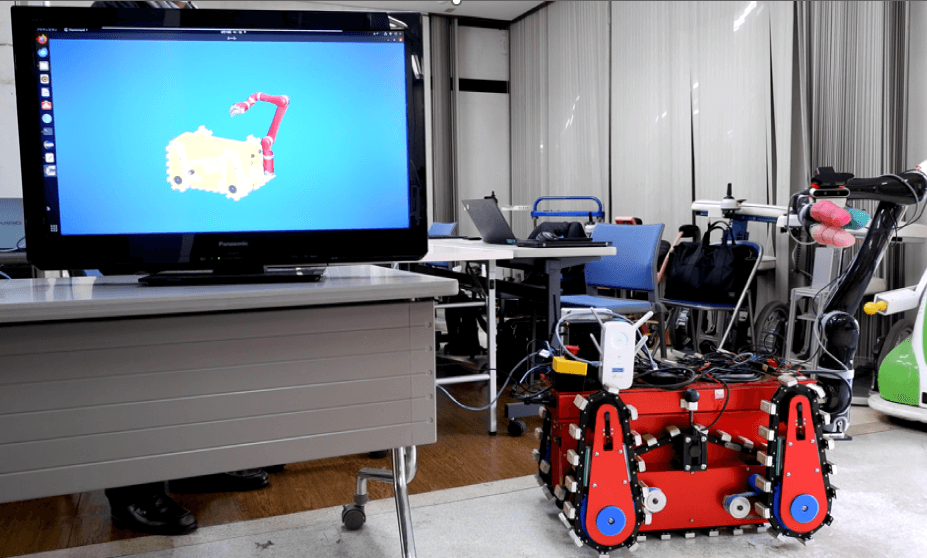
図4.実証実験の様子
3.課題
実証実験として実機とシミュレータの挙動比較を行ったが、約5秒間のラグが発生しました。今後は、操作履歴データ送出のタイミングや受信側の処理遅延、ネットワークのボトルネックを特定し、よりリアルタイムな動作を再現していきたいと考えています。
また今回、OpenRTM-aistやChoreonoidのバージョンをOpenRTM-aist用MQTT通信モジュールに合わせたため最新のモジュールでの組み合わせ、実装ができませんでした。OpenRTM-aistとChoreonoidの最新バージョンに合わせて通信モジュールを使ったRTCの改変も試みたいと考えています。
福島コンピューターシステム
研究開発担当:永井