こんにちは、株式会社クフウシヤです。
当社では、サービスロボットを中心とした「まだ世の中にないロボット」の開発に取り組んでいます。
ここでは、四脚ロボットの1つである「Boston Dynamics製 SPOT」(以下、SPOT)を活用した、車輪型ロボットやドローンが利用困難な環境における自律走行や点検などの実証実験についてご紹介します。
注(*)(**):「Boston Dynamics」および「SPOT」はBoston Dynamics, Inc.の登録商標です。
1.SPOTでできることは?
SPOTには、前後左右にRGB-Dカメラが搭載されており、事前に点検したい経路や場所をマッピングすることで走行経路の途中にある障害物を回避しながら走行が可能な「Auto Walk」という機能が搭載されています。
国内外では、この機能を活用した建設現場での定期的な点検や、空港の敷地内における点検の実証なども行われています。
今後SPOTが活用できそうなシーンはたくさん想定されますが、どこでも安全に走行できるというわけではなく、走行したい環境ごとに微調整は必要です。
2.様々な条件下での走行データの取得
そこで、当社ではロボットの実証試験場である「福島ロボットテストフィールド」をはじめとし、様々な条件下において、人に代わってどこまで安全に走行可能なものかなどのデータ取得を行っています。
データ取得の例としては、以下のようなものがあります。
① 階段はどれくらいの高さまで昇れるか、降りられるか
② 走行経路の途中に障害物がある場合、どれくらいの間隔であれば回避できるのか
③ 路面が濡れている場合は、どれくらいのスピードで移動できるのか
④ トンネルのような電波の届きづらいところでは走行できるのか
例えばですが、角度が急な高さの階段や、でこぼこした平坦ではない道、路面が濡れている場合などでは条件が異なるため、SPOTの導入を検討しているものの、安全に走行できるかどうか不安という声も多いことが現状です。

↑福島ロボットテストフィールド屋外での実証試験の様子。

↑Auto Walkでマッピングした経路の途中に人がいる場合には、障害物回避として人や物を避けて走行することが可能。


↑福島ロボットテストフィールド屋内での実証試験の様子。階段の昇り降りも可能。
3.SPOT SDKやSPOT ROSを利用したカスタマイズ制御
ユーザーがSPOTを活用するためには、以下の3つのアプローチがあります。
① リモコン操作のラジコンとしてSPOTを目視/目視外でタブレット操作し、カメラ画像で情報を取得する
② Auto Walkなど、提供されるGUIアプリを使いこなして自律移動や画像/動画収集などを自動化、無人化する
③ SPOT SDK や SPOT ROS を利用したプログラミングやセンサーの増設、あるいは、システムインテグレーションで①や②ではできないタスクを自動化する
SPOTは上記②Auto Walk機能による自律移動が可能ですが、③「SPOT SDK」や「SPOT ROS」を活用することで、さらにカスタマイズした制御が可能となります。
例えば、工場や倉庫で自動巡回し、センサーやアルゴリズム開発にて安全点検を行うというような制御です。
また、建設現場で進捗状況を確認したり、災害現場で人命救助を支援するロボットを開発するなど、プログラミング知識があれば、特殊な用途に合わせてカスタマイズすることも可能です。
ほんの一例ですが、他にも以下のような活用例が想定されます。
① 農業:SPOTにカメラやセンサーを搭載し、農作物の健康状態を監視したり、害虫の発生を検知する
② 警備:施設内や敷地内を巡回し、不審な活動を検知してアラートを送信する
③ エンターテインメント:ダンスパフォーマンスやプロモーションイベントでのアクションをプログラムして実行する
④ 教育:プログラミング教育のツールとして、学生に実際にロボットを動かす体験の提供
⑤ 研究:移動ロボットに関する研究開発に使用し、新しいアルゴリズムや技術のテスト
SPOT SDK:
• SPOTを制御するための公式ツールなので、セットアップや使い方が比較的簡単です。
• 予め準備されたコマンドやパラメータなどを活用することで、ロボットに特定の動作やタスクを実行させることができます。
SPOT ROS:
• SPOT SDKをもとに、ROS(ロボティクス・オペレーティング・システム)と呼ばれる、ロボット制御のための共通基盤を使います。
• ROSは、研究や実験に広く使われているので、他のロボットやセンサーとの連携がしやすいです。
• より複雑な動作やタスクを実現するための柔軟性がありますが、使いこなすにはロボットに関する広範な知識が必要です。
おおまかにまとめると、SPOT SDKは使いやすく、SPOT ROSは柔軟性が高いという特長があります。
これらの多様な応用例により、SPOT SDKやSPOT ROSは幅広い分野での活用が期待できます。
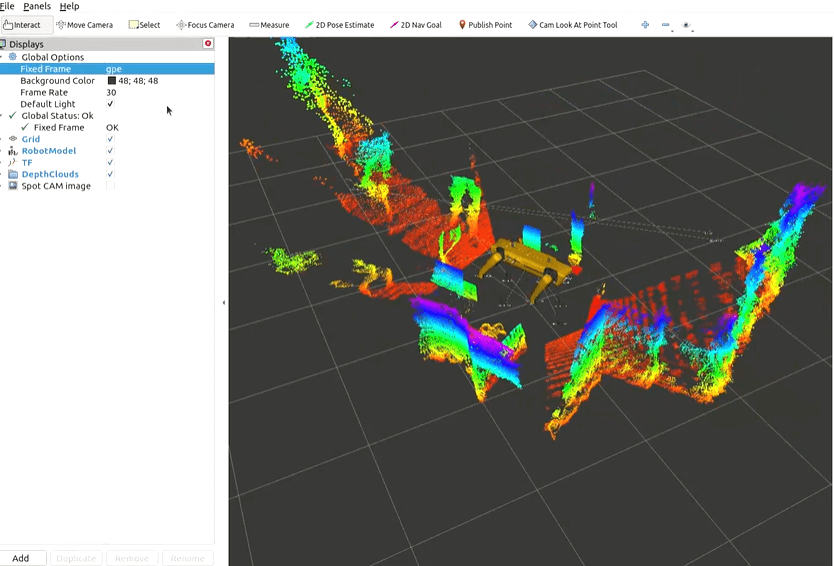
↑SPOT ROSとSPOTに搭載されている深度カメラを連携した3次元画像の表示。
ROS用の他ツールを使用して、SPOTの3Dモデルを表示し、ロボットの状態を視覚的に確認することができる。
4.今後の取組について
ロボットは、人の仕事を奪うものではなく、協働するパートナーとして活躍していくと考えています。
当社は、ロボット開発以外にもサービスロボットSIerとしても活動しており、ロボットの普及が進んでいくこれからの時代においてSPOTのようなロボットが、より身近な存在となるような一助を担いたいと考えています。今後もSPOTを活用した、自律移動におけるカスタマイズ制御を模索していきます。
株式会社クフウシヤ
問合せ:大西、秋元