混雑状況等を移動ロボットの経路計画に反映するシステム
こんにちは、株式会社FSKです。
当社ではシミュレータChoreonoidを活用したサイバーフィジカルシステム(以下、CPS)の研究開発を行っております。
2024年度はロボットの経路計画に必要な建物内の各施設や通路などの混雑状況(動的障害物の状況)を把握するシステムの開発を行いました。
これまでの屋内ロボットは、進行方向に人がいる場合、人が避けることを前提として移動していました。しかし、通路の幅が狭い、あるいは混雑度が高い環境では、人が身動きできず、ロボットが立ち往生してしまうケースもあります。この課題に対し、図1のように外部カメラからの情報をもとにロボットが混雑を避ける経路を自律的に選択できるようにすることで、よりスムーズで安全な移動をすることを目指します。
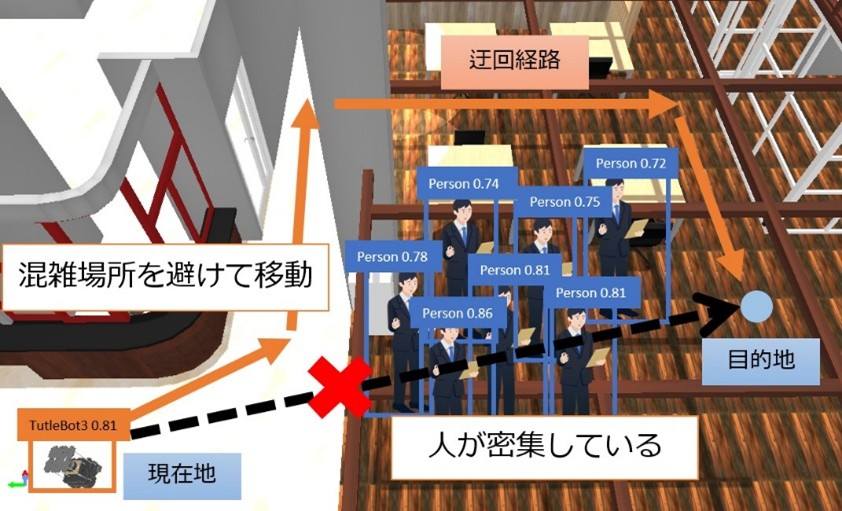
図1 混雑を避けたナビゲーションイメージ
本システムでは、混雑状況をもとにロボットの移動経路を柔軟に変更することで、衝突リスクの低減と、移動効率の向上を図ります。これにより、従来のように人がロボットを避けるのではなく、ロボットが人を積極的に回避する動作が可能となり、サービスとしての受け入れやすさや施設の快適性の向上にもつながると考えています。
本システムを実現するためには、外部カメラを用いて実空間の混雑状況や静的・準静的物体(椅子や机など)を認識することで建物内の各施設や通路の人の混雑状況等を把握し、その情報を移動ロボットと共有する必要があります。2024年度はまず、これらの処理を仮想空間で再現するため、シミュレータChoreonoidを用いて図2のシステムを構築し検証を行いました。
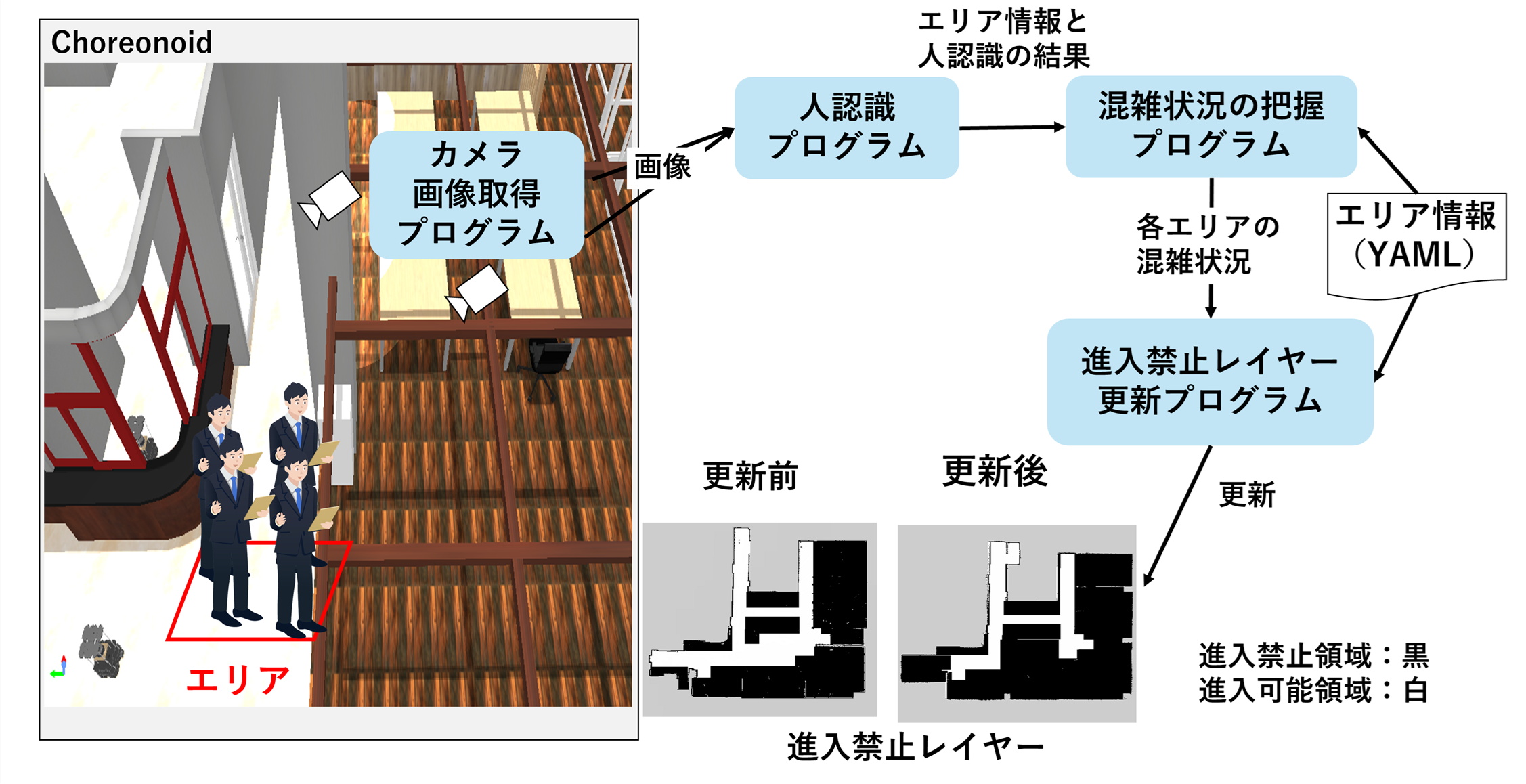
図2 混雑状況を避けたナビゲーションシステム
仮想空間に構築したシステムの検証の結果、混雑状況に応じて進入禁止エリアを地図上で更新することで、混雑していない経路での移動が可能となることを確認しました。
一方で、狭い通路を通っている途中で元の経路の混雑状況が緩和された場合、元の経路で移動しようとしロボットが身動きを取れなくなるという問題も確認されました。
今後は狭い通路での移動における課題の解決やシミュレーションを活用した開発成果を実機ロボットに反映し、製品化につなげられるように引き続き取り組んでいきます。
株式会社FSK
研究開発担当:馬上