クラウドロボティクス・インターネット分散システムについて
はじめに
こんにちは、東日本計算センターです。
今年で創業60年を迎える当社は、福島県いわき市に本社ならびに「ながとイノベーションセンター」(廃校を活用したR&D施設)を置き、東京/日立/横浜、県内は会津若松市/郡山市にもオフィスを設けており、今年3月から大熊町にもオフィスを設けております。
近年は、R&Dセンターが中心となり、各事業部と連携して、搬送ロボットや水中ロボット、ドローン等の研究開発をしています。
ここでは、会津大学との取り組み(産学連携ロボット研究開発支援事業)で研究開発していますクラウドロボティクスインターネット分散システム(The Distributed Cloud Robotics System on the Internet)(以下、DCRシステム)について紹介します。
DCRシステム研究開発の目的
DCRシステムの研究開発は、将来的なサービスロボットの実用化を見据えた取り組みです。
現在、ファミリーレストランで使われている配膳ロボットのように、ロボットは主に店舗ごとに現地のスタッフによって管理・運用されています。
しかし今後は、離れた場所からロボットを管理・操作できる仕組みが必要となり、自律的に動く機能と、人による遠隔操作の両方を柔軟に組み合わせることが求められます。
こうしたニーズに対応するために、私たちはDCRシステムの研究開発を進めており、ロボットを遠隔から安全かつ効率的に運用できる仕組みの構築を目指しています。
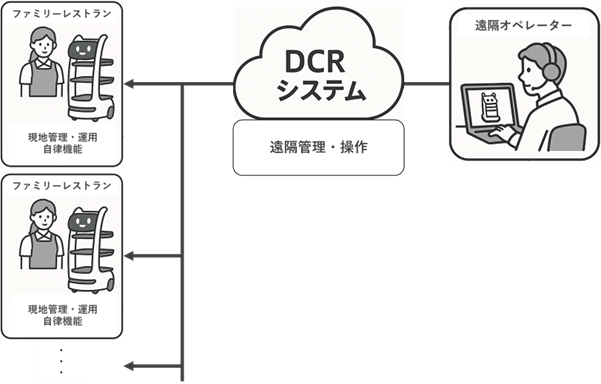
DCRシステムのイメージ図
DCRシステムの構成
DCRシステムは、複数拠点に分散したロボットやサブシステムをクラウド経由で連携・管理するシステムです。2024年度の本システムは以下の4つの要素で構成され、それぞれが役割を担いながら、遠隔地におけるロボットの自律移動や遠隔操作を実現します。
- 上位系システム
各拠点に配置されたロボットへ移動指示を行います。
- 物体認識システム
拠点内に設置されたカメラからの画像をもとに、ロボットや机・椅子などの物体を検出し、位置を推定して提供します。
- ロボット
地図データや上位系からの移動指示を受け、目的地まで自律走行します。
- RDR(ロボットデータリポジトリ)
ロボットから送られてくる位置情報や動作ログなどの各種データを蓄積・管理します。
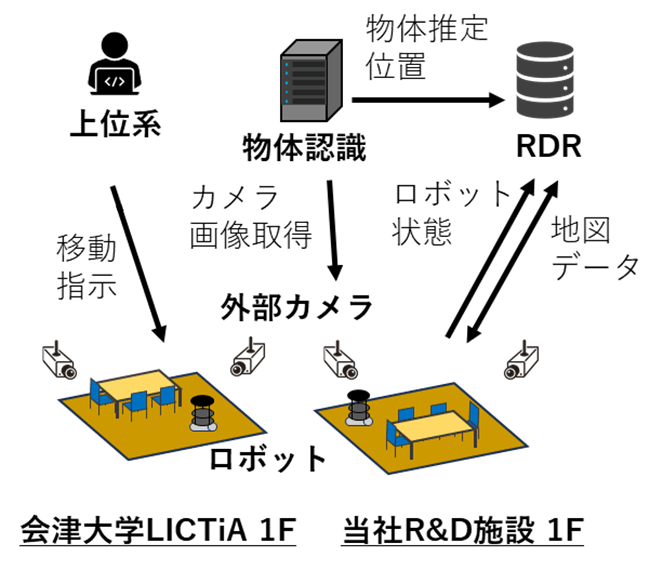
DCRシステムの構成図(2024年度)
DCRシステム実環境による検証(LICTiA→ながとイノベーションセンター)
ながとイノベーションセンターに設置したロボットを対象に、監視および遠隔操作をモデルとしたDCRシステムの検証を行いました。
ロボットへの移動指示は、会津大学 LICTiA に設置した端末から送信し、ながとイノベーションセンターのロボットがその指示を受信して、自律的に設定された経路を走行するという検証になります。
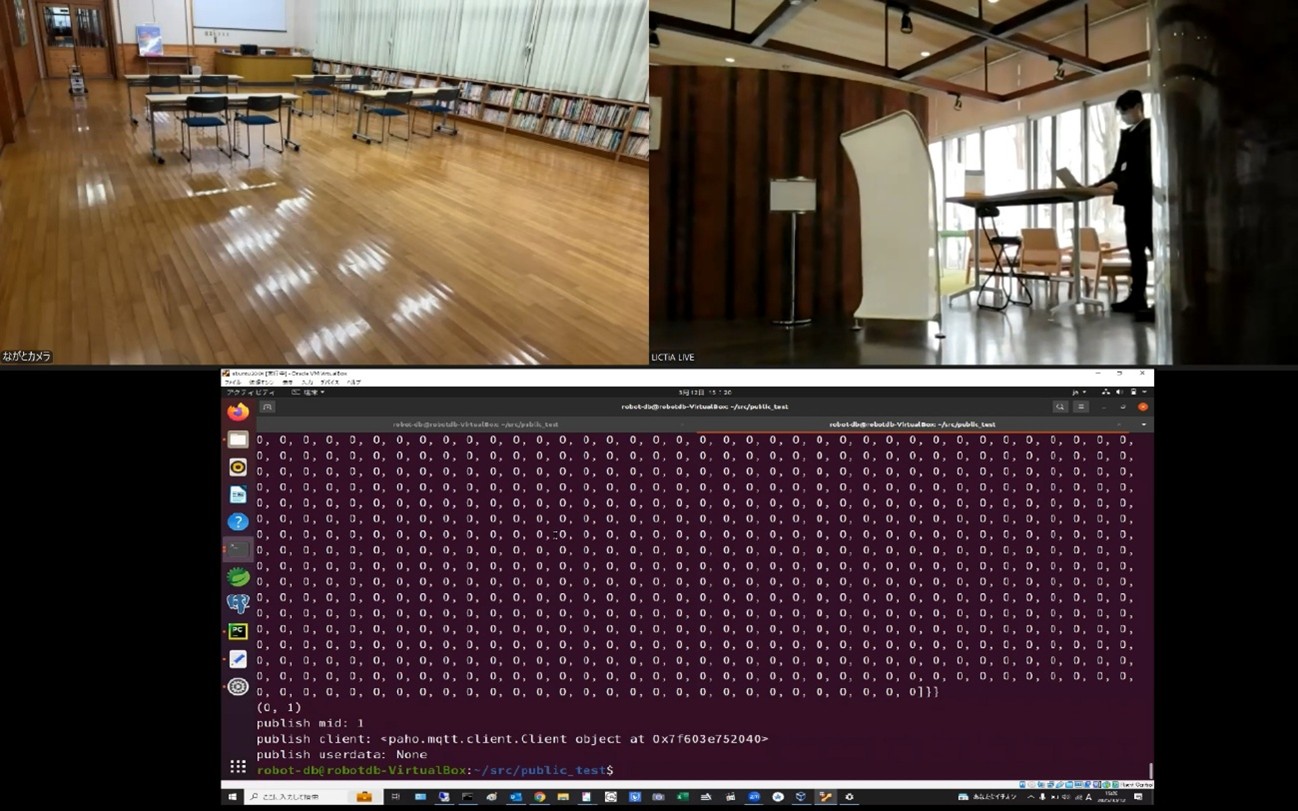
検証の様子(左上:ながとに設置されたロボットの様子、右上:会津大学 LICTiAから
ロボットに指示を送信する様子、下:ロボットに送信した指示コマンド)
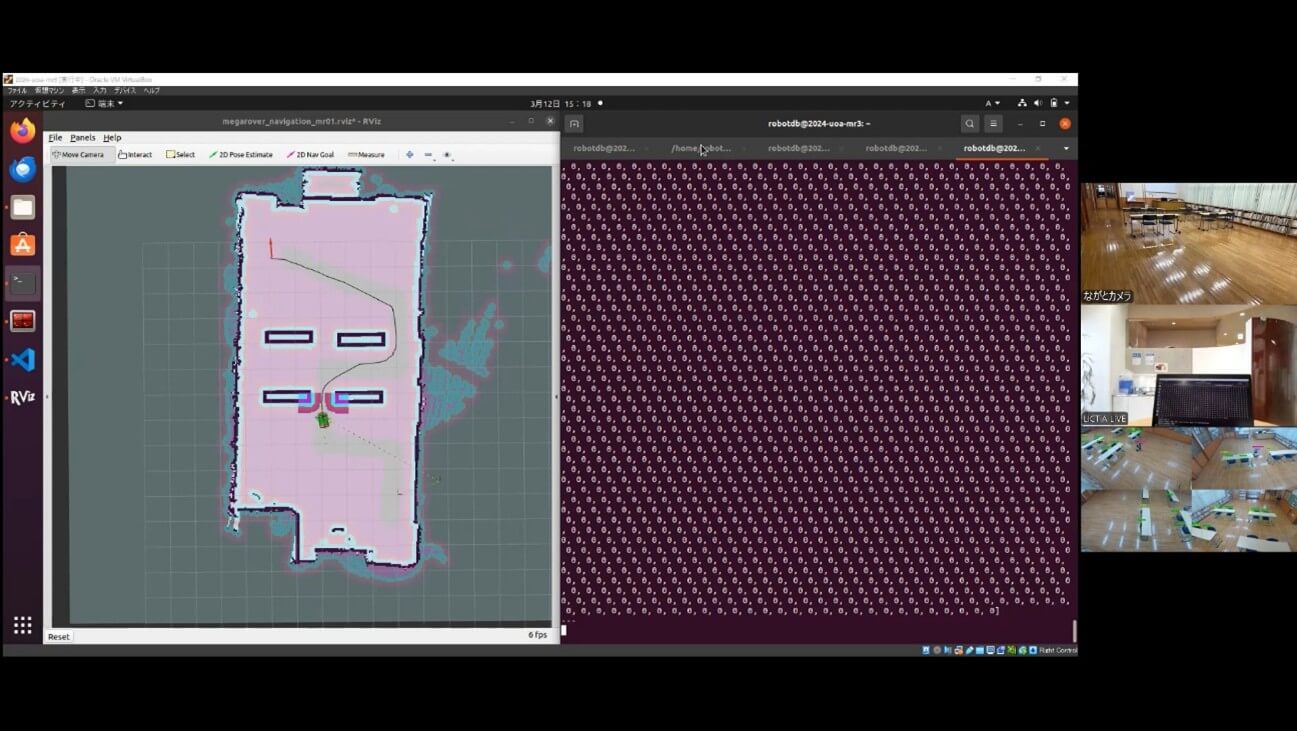
会津大学 LICTiAから受け取った走行指示に従って地図上をロボットが走行する様子

会津大学 LICTiAから受け取ったロボットが走行する様子
まとめ
2024年度は、これまでに開発してきたロボット技術をさらに実用化へ近づけるため、「DCRシステム」という新たな仕組みの開発・検証を行いました。
このシステムでは、ロボットやクラウド機能を担うサーバーを複数拠点に分散配置し、インターネット経由で連携させる構成です。離れた場所からロボットを管理・操作できる仕組みは、将来的に人手不足の解消にも貢献できると考えています。
2025年度は、実環境でのロボット運用を見据え、動く人や物といった障害物の変化に柔軟に対応できる自律ナビゲーションや、遠隔からの操作機能の高度化を目指します。
特に、安全かつ効率的に移動するために、動的環境下での経路計画技術に重点を置いて、将来的には、これらの技術を応用し、屋内案内や物流配送といったさまざまなサービス分野への展開を目指しています。
東日本計算センター
研究開発担当:鈴木