ここでは本サイトに登録したコンポーネントの情報を更新する「コンポーネント更新」機能について説明します。コンポーネントは、登録者のみが更新可能です。各ファイルのアップロード機能について、一回の登録作業につき、全体で20MBまでアップロードできます。
【更新方法】
1.更新したいコンポーネントを検索します。
2.コンポーネント詳細ページを閲覧します。
3.当該コンポーネントを登録したユーザーでログインします。
4.画面下部に「更新」ボタンが表示されるので、クリックします。
各項目の注意事項を参考にコンポーネント情報を更新してください。
RTC.xmlファイル読み込み
RTC Builderで登録したコンポーネント情報を一括登録することが出来ます。更新でRTC.xmlを登録した場合、すでに登録されたRTC.xmlの内容がすべて上書きされます。RTC Builderより出力したRTC.xmlファイルを指定してください。読み込んだ場合、「概要」欄が未入力の際は、RTC BuilderのRTCプロファイルエディタ「基本」タブの「モジュール概要」が初期値として自動挿入されます。また、「問い合わせ先」欄が未入力の際は、RTC BuilderのRTCプロファイルエディタ「ドキュメント生成」タブの「作成者・連絡先」が初期値として自動挿入されます。その他、基本的な項目を読み取り、画面に表示します。これらの項目は本サイト上から修正することはできません。
ドキュメント、ファイルアップロード、イメージ画像を参照している状態で「RTC.xmlファイルを読み込み」をクリックした場合は、参照したドキュメント、ファイルアップロード、イメージ画像がクリアされてしまうため、再度参照してください。
下記がRTC.xml(RTCプロファイルエディタ)から取り込まれ、画面上に表示される項目の一覧になります。各項目の文字数によっては、その一部のみが取り込まれます。
一覧に掲載されていない項目は、ダウンロードしてご確認いただけます。
| 基本 |
モジュール名 |
| モジュール概要 |
| バージョン |
| コンポーネント型 |
| アクティビティ型 |
| コンポーネント種類 |
| 最大インスタンス数 |
| 実行型 |
| 実行周期 |
| データポート |
名前 |
| フローポート |
| データ型 |
| 説明 |
| コンフィギュレーション |
名前 |
| データ型 |
| デフォルト値 |
| 設定範囲 |
| 説明 |
| ドキュメント生成 |
作成者・連絡先 |
| 言語・環境 |
言語 |
| 言語のバージョン |
| OS |
OSのバージョン
|
| 依存ライブラリ |
Name |
| Version |
| Info |
RTC.xml出力方法について
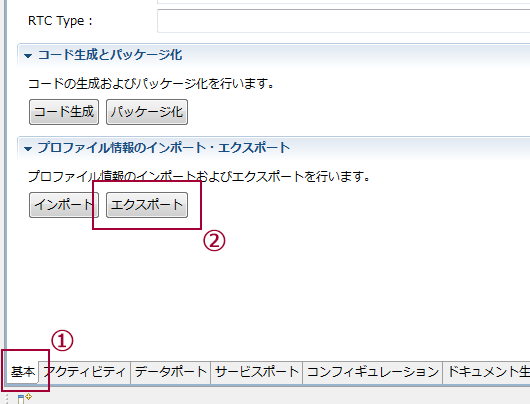
RTC Builderを起動し、対象のコンポーネントのRTCプロファイルエディタを開きます。
1.「基本」タブを開きます。
2.「エクスポート」ボタンをクリックします。
コンポーネント更新情報入力
- コンポーネント名
- 登録するRTコンポーネントの名称になります。入力必須です。登録後、キーワード検索の際に検索対象となります。
- 概要
- 登録するRTコンポーネントが提供する機能の概要説明になります。入力必須です。登録後、キーワード検索の際に検索対象となります。未入力の状態でRTC.xmlファイルを読み込んだ場合、モジュール概要が初期値として自動挿入されます。
- カテゴリ
- 登録するRTコンポーネントの大まかな機能の分類を選択します。最低1つは選択必須です。最大3つ選択することができます。
下記がカテゴリの一覧となります。
| ロボット技術分野・適用分野 |
| ロボット技術分野 |
移動ロボット |
| 飛行ロボット |
| ドローン |
| 水中ロボット |
| 遠隔操作・テレオペレーション |
| ヒューマノイド |
| 二足歩行 |
| マニピュレータ |
| 垂直多関節ロボット |
| スカラーロボット |
| パラレルロボット |
| 多指ハンド |
| 群ロボット |
| マイクロ・ナノロボット |
| 手術ロボット |
| 惑星探査ロボット |
| 生物模倣ロボット |
| ユビキタスロボット |
| モバイルマニピュレーション |
| ITS |
| 適用分野 |
産業用ロボット |
| サービスロボット |
| 医療ロボット |
| 介護ロボット |
| 農業ロボット |
| 林業ロボット |
| 漁業ロボット |
| 災害ロボット |
| レスキューロボット |
| 極限作業ロボット |
| 宇宙ロボット |
| エンターテイメントロボット |
| 基本機能別分野 |
| 移動 |
自己位置同定 |
| 地図作成 |
| SLAM |
| 走行制御 |
| 歩行制御 |
| 飛行制御 |
| 経路プランニング |
| モーションプランニング |
| 歩容プランニング |
| ナビゲーション |
| 障害物回避 |
| 作業 |
ティーチング |
| 把持制御 |
| マニピュレータ制御 |
| 協調制御 |
| 作業プランニング |
| 作業軌道生成 |
| タスク |
| スキル |
| 見まね作業 |
| コンプライアンス制御 |
| インピーダンス制御 |
| 対話 |
音声認識 |
| 音声処理 |
| 音源同定 |
| 話者認識・推定 |
| 音声合成 |
| 対話シナリオ生成 |
| 対話シナリオ実行 |
| 画像認識・処理 |
コンピュータビジョン |
| 画像処理 |
| 画像認識 |
| パターン認識 |
| 対象物位置推定 |
| キャリブレーション |
| 顔認識 |
| 人物認識 |
| ボーン認識 |
| ジェスチャ認識 |
| トラッキング |
| 人工知能 |
推論 |
| 認識 |
| エージェントシステム |
| 機械学習 |
| ニューラルネット |
| ディープラーニング |
| その他 |
シミュレーション |
| 環境認識 |
| モニタリング |
| 空間知能化 |
| センサネットワーク |
| 分散ロボットシステム |
| 自己組織化 |
| モデリング |
| 運動学 |
| 動力学 |
| アーキテクチャ |
| プロトコル |
| ミドルウェア |
| 安全 |
| ハードウェア技術分野 |
| センシング |
カメラ |
| 光センサ |
| 赤外線センサ |
| マイク |
| 触覚センサ |
| 力覚センサ |
| トルクセンサ |
| 圧力センサ |
| 重量センサ |
| レーザー測域センサ |
| 生体情報 |
| IMU |
| 加速度センサ |
| ジャイロセンサ |
| 方位センサ |
| 温度センサ |
| 湿度センサ |
| GPS |
| アクチュエータ |
電動回転モータ |
| 電動直動モータ |
| 油圧回転アクチュエータ |
| 油圧直動アクチュエータ |
| 人工筋肉アクチュエータ |
- タグ
- 登録するRTコンポーネントのタグを選択します。本サイトのタグはサイト管理者が登録しています。表示されるタグの一覧より、タグを選択してください。「表示タグを絞り込む」の欄に文字を入力すると、入力した文字を含むタグのみを表示することが出来ます。タグは最大10個選択することができます。
- ハードウェア
- 登録するRTコンポーネントが使用する機材を入力します。最大6つまで入力することができます。登録後、キーワード検索の際に検索対象となります。
- 問い合わせ先
- 登録するRTコンポーネントについての問い合わせ先を入力します。未入力の状態でRTC.xmlファイルを読み込んだ場合、作成者・連絡先が初期値として自動挿入されます。
- ライセンス
- 登録するRTコンポーネントのライセンスを選択します。一覧に該当するライセンスが存在しない場合は、「その他のライセンス」を選択後、表示される入力欄にライセンス名称を入力してください。登録後、キーワード検索の際に検索対象となります。
- 著作権
- 登録するRTコンポーネントの著作権元を入力します。
- ドキュメント
- 登録するRTコンポーネントのドキュメント(マニュアル等)を記載したPDFファイルをアップロードします。また、ドキュメントの名称を下の入力欄に入力します。アップロード時、アップロードしたファイルの名称を自動的に入力欄に挿入します。最大5つまでアップロードすることができます。1ファイルのファイルサイズの上限は8MBとなります。ドキュメントを更新する場合は、登録済みのドキュメントはすべて削除されます。残したいドキュメントは再度アップロードする必要があります。ファイル参照後、「RTC.xmlファイルを読み込み」をクリックした場合、参照した内容がクリアされてしまうため、再度ファイルの参照をする必要があります。
- ファイルアップロード
- 登録するRTコンポーネントをzip形式で圧縮しアップロードします。RTC Builderで作成したフォルダー以下をzipに圧縮してアップロードしてください。その際に容量が8MBを超える場合はcmakeで作成されたファイル等は削除してください。ファイルをアップロードした場合、登録済みのファイルが履歴として残ります。ファイル参照後、「RTC.xmlファイルを読み込み」をクリックした場合、参照した内容がクリアされてしまうため、再度ファイルの参照をする必要があります。GitHubで公開している場合は、GitHubリポジトリのURLを入力してください。入力したURLへのリンクが作成されますので、URLの記述間違いに注意してください。
- イメージ画像
- 登録するRTコンポーネントで使用するハードウェアの画像、ソフトウェア・アルゴリズムのイメージ画像、コンポーネントのビルドビュー画像をアップロードします。登録後の画像の優先順位は左側が優先されます。RTコンポーネント検索時、一番左側に登録した画像を、検索結果に表示します。1ファイルのファイルサイズの上限は8MBとなります。イメージ画像を更新する場合は、登録済みのイメージ画像はすべて削除されます。残したいイメージ画像は再度アップロードする必要があります。ファイル参照後、「RTC.xmlファイルを読み込み」をクリックした場合、参照した内容がクリアされてしまうため、再度ファイルの参照をする必要があります。推奨される画像サイズの比率は4:3(例として、横が300pxであれば縦が225px)です。
- 関連リンク
- 登録するRTコンポーネントに関係するリンクを登録できます。リンク先のサイト名とURLを入力します。最大3つまで登録することができます。
- その他
- 登録するRTコンポーネントについて、その他の情報をご自由に入力します。
- 更新コメント
- 更新理由、更新箇所を記入します。
- 同意する
- サイトポリシー、サービス利用規約、プライバシーポリシーをご確認の上、同意する場合はチェックを入れてください。
登録するには、同意が必須となります。
- 私はロボットではありません
- GoogleのreCAPTCHAを導入しています。登録するには、クリックが必須となります。
RTコンポーネントの登録情報を入力後、ページ下部の「確認する」ボタンをクリックしてください。コンポーネント登録内容確認ページが表示されます。入力内容をご確認いただき、「登録する」ボタンをクリックしてください。入力いただいた内容で登録を行います。
入力内容の訂正がある場合は、「戻る」ボタンをクリックしてください。更新画面に戻ります。その際、ドキュメント、ファイルアップロード、イメージ画像については、参照した内容がクリアされてしまうため、再度ファイルの参照をする必要があります。