大会概要
World Robot Summit 2020 福島大会
日程:2021年10月8日(金)~10日(日)※終了
場所:福島ロボットテストフィールド(福島県南相馬市原町区萱浜字新赤沼83番 南相馬市復興工業団地内)
主催:経済産業省、新エネルギー・産業技術総合開発機構(NEDO)
World Robot Summit 2020 福島大会
出場結果

チーム「REL-UoA-JAEA」
〈最終結果〉
3位(WRS実行委員長賞)
〈準 決 勝〉6チーム中、3位で準決勝を通過
〈予 選〉全9チーム中、6位で予選を通過
〈出場チーム〉
REL-UoA-JAEA(会津大学)…3位
Alpaca Robotics(ペルー、University of Engineering and Technology)
con brio(個人参加)
Hydragon(千葉工業大学 / ソフトバンクロボティクス)
MASARU Season 3(個人参加)…2位
NIIT-BLUE(新潟工科大学)
ODENS(大阪電気通信大学)
Rogiken+(東京工業大学)
TEAM-TNK-ROS(筑波大学)…1位
福島大会全チャレンジの結果
今回の大会のために開発した技術、ポイント
〈学部4年 大橋 彩人〉
私たちが⼤会に向けて開発した技術は3つあります。
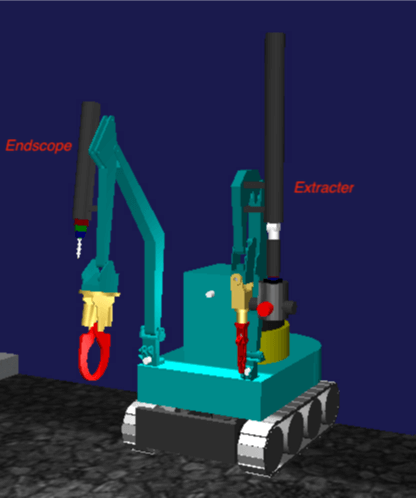 機体の全体図
機体の全体図
① QR コードを読み込むためのアーム(Endscope)の開発
これがあることによって、天井についているような⾼い位置にあるQR コードを読み込むことができます。
ここの大部分は、WRS2018年大会に出場した先輩方が開発しました。
② QR コードを読み込んでその情報をrviz上に表⽰させるプログラムの作成
rviz(操作側が⾒る画⾯)上に表⽰させることによって瞬時にQRコードの情報がわかります。
【苦労した点】
Task4(トンネル壁面/付帯設備の点検)では、⼤量のQRコードの中から指定された位置を読み込まなくてはならず、それを毎回スマートフォンで読み込むのは⼤きな時間のロスでした。その時間を短縮するために⾃動読み取りに取り組みましたが、その際のカメラデータを取得する⽅法で苦労しました。Choreonoidにはカメラデータを画像として保存する機能がありましたが、Choreonoidが実⾏中のPCに画像が保存されてしまうので、遠隔PCから操作することを前提とした⼤会ではこの仕様は使えませんでした。ここでFSKの⽳澤さんにChoreonoid/ROSの講習会や開発のお⼿伝いをしていただき、ROS message機能を使いカメラ画像をパブリッシュし取得した画像データを変換・解析することでQRコードの⾃動読み取り機能を実装することができました。この部分は特に、株式会社FSK ⽳澤さん、鶴野 皓太くん(学部4年)に協力いただきました。
【開発に用いた知識・技術】Choreonoid/ROS/Python/OpenCV
③ 棒引抜き専⽤のアーム(Extracter)の開発
専用アームで4つある突起の⾊を⽬印とし回転させることによって棒引抜きのタスクを確実かつ素早く⾏うことができます。
【苦労した点】
Task2(経路の確保)の棒引き抜きというタスクは、従来のアームでは棒を掴む⼒が弱く、また棒を回すことができる位置にアームの先端を持ってくることが難しい課題でした。それをクリアするためのアームのモデル作成とコントローラの作成が最も苦労しました。モデル作成については、棒を引き抜くための専⽤アームというものが現実世界にないため、それをモデルで作成する上で参考となるものがないので時間がかかりました。コントローラ作成については、コントローラファイル(C++で書かれたファイル)の中⾝を解析するのに時間がかかりました。この部分は特に、成瀬先生に協力いただきました。
【開発に用いた知識・技術】Choreonoid/fusion 360/Blender/C++/YAML/URDF
参加した感想
チームリーダー〈学部4年 青葉 龍馬〉

現地に滞在したこの5日間は、本当に忙しく過ぎていきました。準備して練習して本番が始まってと、とにかくすべきことが多くありました。まずは予選。予選が終わって点数を見せられたときは、正直予選敗退かなと思いました。ただ運がよく、上位6チームが予選通過のところ6位に滑り込めたのでよかったなと思います。しかし他のチームの点数を確認した時は、その次の決勝進出は厳しいかもしれないと思いました。なぜなら満点の100点近くとっているチームが4チームもあったのに対して、私たちは少しトラブルがあり十分な力が発揮できず64点とかなりの点差がありました。準決勝はチームのみんなが頑張ってくれたおかげで予選よりも2倍近くの点数を出すことができ、3位で通過することができました。同じトラブルを招かぬよう慎重に挑んだとはいえ、正直ここまで点数が伸びるとは思いませんでした。決勝では、もてる力のすべてを出し切って臨みました。準決勝より高い点数を出すことができていたので、これは1位、厳しくても2位なら獲れるかな!と思っていましたが、上には上がいるということを改めて思い知らされました。ただ、このような大会で3位という成績を残せたのはチームが一丸となって頑張れたからなのかなと思います。
今回、大会に出場して気づいた改善点が幾つかあります。例えば「地図生成」です。今回タスクごとの点数の他に地図生成ができれば取得できる環境点という点数がありました。私たちは今回地図生成を行っていないので環境点は0点です。地図生成は、その場の状況把握に大いに役立つと考えています。他にもありますが、このような改善点について解決する方法はあると思います。しかし、あくまで他のチームができていたからできるだろうといった観測でしかありません。今すぐに解決する方法は正直わかりません。ですので後輩の皆さんには、是非コレオノイドを深く学んでいただき解決策を模索していって欲しいと考えています。簡単に解決できるものではないですが、是非挑戦してください。もし困ったことや分からないことがある時は、力になれればと思っています。
〈大学院修士1年 Kabir RAIHAN〉

We are the WRS simulation team named “REL-UoA-JAEA” in the disaster robotics category. We have participated WRS competition, and we secured 3rd position. It’s the best team I ever worked with. In our team, every team member is so friendly and cooperative. Also, the team works very organized way and every member tried their best to reach our desired goal. I’m an international member of our team and I know Japanese a little bit, however, every member of our team helped me a lot to communicate with them during teamwork. Also, every member of this team is very cheerful and caring to each other. Our team coach professors were also very careful with our team and their guidance helped us to achieve this goal.
This five-day WRS competition was so exciting and challenging. After the preliminary challenge, when we got the result that we are going to the semi-final, we were so happy. After the semi-final challenge, we got the result that we are going to participate in the final round. At that moment, we were speechless and with so much happiness. At last in the final round, we tried our best, however, we got the 3rd position. All of the persons from UoA (The University of Aizu) are so happy and we will try to do better in the future. Also, we are pleased to attain to the final result in this competition as well as the organizational support from the WRS officials.
I’m glad I could participate in this WRS competition. I learned many things and got the best experience in my life from our team and the five days competition.
〈学部3年 志賀 海月〉

WRS2020では、シミュレーションの操作担当として参加させていただきました。
私が操作を担当したコースについて。予選では、ドローンを使える方が有利にタスクを進めることができましたが、本戦に進みコースに「風が吹く」という条件が追加されたことでエンドスコープの機能が有利になり、チームが独自に開発したパーツを存分にアピールすることができました。それは、私が目標としていたことのひとつです。
初めての参加だったため、他のチームがどんなロボットを使うのか楽しみにしていたのですが、実際はロボットの工夫だけでなくコントローラーやシステム面を充実させているチームが印象に残りました。コントローラーが特殊なチームは1人でロボットを2台操作することが目的であることや、人が直感的に操作することができるなどコンセプトが強く出ている点が魅力的でした。システム面では、QRコードの座標取得とコースの地図生成に成功しているチームが印象に残りました。私たちはどちらもできておらず、今大会他チームとの差になったのはこの2つであると考えています。次回、同様の大会でより上の順位を目指すために不足していた点を明確にすることができたので、この2つのシステムの実現を今後の研究に繋げていきたいと思います。
講評
トンネル事故災害対応・復旧チャレンジ出場チーム担当教員
上級准教授 渡部 有隆
会津大学チームREL-UoA-JAEAはWRS2020トンネル事故災害対応・復旧チャレンジ(シミュレーション)部門に参加し、9チーム中世界第3位(WRS実行委員長賞)の成績を修めました。強豪チームがひしめく中、学生の皆さんが素晴らしいパフォーマンスを発揮し入賞を果たすことができました。
WRSシミュレーション部門は、技術力・操作力だけでなく、迅速で柔軟な発想を求められる複合的な競技です。さらに「災害対応」をリアルに演出した審判の下、高い緊張感の中、厳格でかつ臨機応変なルールに適応できる想像力と精神力が必要となる大会です。大会へ向けた準備も含め、競争と協調によって実用的な技術力を高めることができる、大変素晴らしい学術的な競技会であると認識しました。本大会の準備と5日に渡る競技会を通して、学生の皆さんは多くのことを学んだと確信しています。
私達が入賞できた勝因は、2018年大会の優勝以降、3世代に渡り技術継承を行い、予め公開されていたタスクを最低限遂行することができるソフトウェアシステムを事前に構築し大会に臨むことができたからです。また、チーム全員が十分な操作訓練を積み、タスクごとに操作者を組み替えるなど、チームワークを発揮したことも大きな要因です。私たちのチームの操作技術やチームワークは、他より秀でており、実況でも終始称賛されていました。コースは難化しているにもかかわらず、予選、準決勝、決勝に進むにつれてスコアを更新していき、大会中に課題に適応することができたこともチームワークの成果です。
一方、今大会は、他大学や社会人による強豪チームがひしめく激戦となりました。悔しさは残りますが、優秀なチームの技術を観察することで、多くのことを学ぶことができました。優勝を逃した敗因としては、ルールブックの入念な確認、ポイント獲得の計画(課題の選択等)、特にボーナスポイントを得るための戦略には改善の余地があったと考えています。迅速な動き・対応をするための、可能な限りのモデルの洗練、環境データを取得するシステムの構築等が今後の大会で高スコアを獲得するための課題であると認識しています。
2018年大会から、全体を通して
会津大学ロボット事業プロジェクトマネージャー
特任教授 屋代 眞
会津大学では産学連携でのロボットの研究成果の検証の場としてWRS2018及びWRS2020のシミュレーション競技である「トンネル事故災害対応・ 復旧チャレンジ」およびSTMと呼ばれる「災害対応標準性能評価チャレンジ」に、学生を中心とし企業や教員が連携したチームで参加しました。WRS2018ではシミュレーション競技で優勝し、STM競技ではこのような競技に初めて出場したこともあり、入賞できませんでした。
WRS2020に向けても技術の研究や学生の操縦訓練など行ってきましたが、コロナ禍で1年延期になり、学生達が卒業してしまうなど逆風もある中、新たなメン
バーで2021年度に行われたWRS2020に向けて準備をしてきました。WRS2020では両部門に於いて3位入賞となり、日頃の研究と訓練の成果を発揮できました。会津大学はロボットの機械そのものを作ること以上にその上で活躍するソフトウェアに強みを持っており、WRS2020では産学連携の力とともにその強みを生かして入賞を果たしました。まだまだソフトウェア研究の成果を生かしていく行く余地もあり、今後のさらなる進化が期待されます。
WRS2020では同じ福島県の復興の真っ只中でWRS2020というよりロボット制作そのものに初挑戦した南相馬市の、これも企業と学校が協力したMISORAチームがSTM競技で2位入賞を果たしました。会津大学は南相馬市のロボットテストフィールドに研究センターを構えていることもあり、当初からMISORAチームに支援を続けてきたので、この快挙も喜びであると同時に、南相馬市のロボット技術・産業のこれからの発展を多いに期待し、協力を続けていきたいと思っています。
Photo Gallery


※画像をクリックすると、大きなサイズの画像を確認できます。
大会の様子