Choreonoid講習会を福島ロボットテストフィールドで開催(2023年8月24日~26日)
概要

8月24日から26日にかけて、福島県南相馬市の福島ロボットテストフィールド(以下RTF)で、Choreonoid講習会が開催されました。ロボット技術のシミュレーションが今後ますます重要になる中で、南相馬市と関係の深いロボット関連の研究機関の教員、学生、企業が参加して、、ロボット技術者の育成と情報共有を促進するために実施されました。
※この講習会は、会津大学の復興知事業の一環として行われ、昨年度も開催しました。
2022年度 大学等の「復興知」を活用した人材育成基盤構築事業 事業報告
https://rtc-fukushima.jp/column/6370/
講習会の内容

講師
◆中岡 慎一郎氏(株式会社コレオノイド)
会社HP https://choreonoid.org/ja/#
Choreonoidの開発者
◆穴澤 剛士(株式会社FSK)
2017年からChoreonoidを使用した研究開発を行っている
<8月24日>
Choreonoidの基本的な使い方やモデルの作成方法についての講習が行われました。受講生は、Choreonoidがどのようなシミュレーション環境であるか、どのような用途に適しているかを学びました。さらに、Choreonoidの基本的な操作方法やモデルの作成手順は、車輪型モバイルロボットのモデルを実際に作成し習得しました。
 Choreonoid起動画面
Choreonoid起動画面
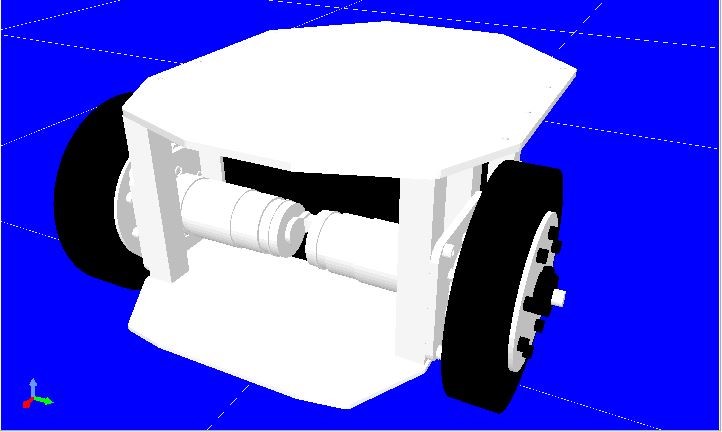 車輪型モバイルロボットモデル
車輪型モバイルロボットモデル
<8月25日>
前日に作成した車輪型モバイルロボットのモデルを使用して、ROS(Robot Operating System)プログラムからモデルを動かす方法についての講習が行われました。受講生は、シミュレータ内でモデルを操作するためのコントローラの作成方法や、モデルのセンサー情報の可視化方法について学びました。ROSを活用して、シミュレータ内のロボットをゲームコントローラで操作する実習も行われ、実際のロボット制御の体験が行われました。
<8月26日>
最終日は自由課題でした。前日までの2日間の復習や、Choreonoidを使用したSLAMなど各自のテーマに基づいて取り組みました。これまでの内容をさらに深めるための新しいモデルやプログラム作成に挑戦したり、それぞれの研究について情報交換する場面もありました。3日間の研修を終え、受講者には修了証が授与されました。
まとめ

Choreonoid講習会は、ロボット技術に興味を持つ学生や研究者たちにとって、実践的なスキルの向上と知識の共有の場として貴重な機会となりました。ロボット開発時にシミュレーションを使用して開発が行えるようになれば、ロボット開発コスト削減やテストスケジュールの削減が可能になると思います。今回の講習会は受講者が今後シミュレーションを使用した開発や研究をするときに役に立つと思われます。
株式会社FSK 産業システム部
馬上 雄