猪苗代町に本拠地を構えるアクアクルー株式会社では、会津大学からの委託を受け、図1~4のように
カメラおよびスイッチロボットを用いた自動・自律ロボットによる利水管理施設の動力制御盤の遠隔監視および操作技術の開発
を行っています。
2021-2022年度には、北塩原村などの利水用施設を利用し、本技術の原理検証レベルでのサービス品質評価やスイッチロボットの改良を行いました。これにより、システムの基本的な性能および動作確認を行いました。
2023年度には、再現性の高いロボット遠隔監視・操作システムの開発と安定性の向上を図りました。その結果、通年での設備の遠隔監視および遠隔操作が可能であることを確認できました。また、複数施設のうち一部の山間部地域においては遠隔操作・監視を行えるようになりました。
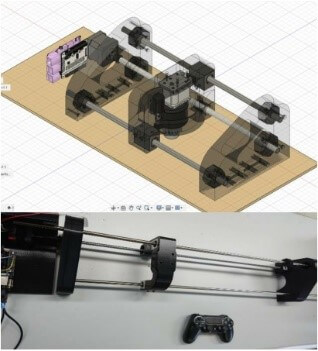 図1. 3Dプリンタで開発したスイッチロボット
図1. 3Dプリンタで開発したスイッチロボット
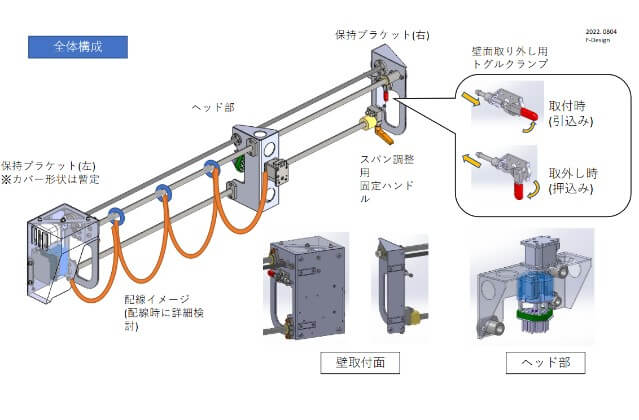 図2. 実環境でも耐えられるようにロボットの外側を改良
図2. 実環境でも耐えられるようにロボットの外側を改良
 図3. 遠隔操作画面と制御盤のUI
図3. 遠隔操作画面と制御盤のUI
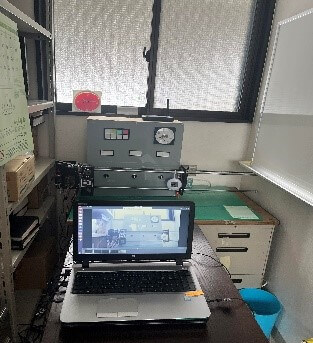 図4. 動力制御盤の監視
図4. 動力制御盤の監視
将来的には、図5のように
複数施設をロボットやカメラを利用して一括管理し、効率的な点検管理
を実現することを目指しています。
しかし、図6のように数十キロメートル離れた豪雪地帯や山間部地域(通信環境の悪い地域)などの過酷な環境にある複数の施設に対して研究活動を行うことは、コストや時間が過剰にかかるという課題があります。この課題を解決するために、図7~8のようにシミュレータを利用したサイバーフィジカルシステム(CPS)による検証の効率化を図りつつ、複数の利水管理設備を対象とした遠隔監視・操作システムの実現可能性について研究開発を進めたいと考えています。
この研究開発により、利水管理施設の管理者は遠隔地からリアルタイムで設備の状況を監視し、必要に応じて操作を行うことが可能となり、管理業務の効率化と安全性の向上が期待されます。さらに、システムの安定性や再現性の向上により、長期的な運用が可能となり、災害時などの緊急対応能力も強化され、地域社会への貢献度も高まると考えています。
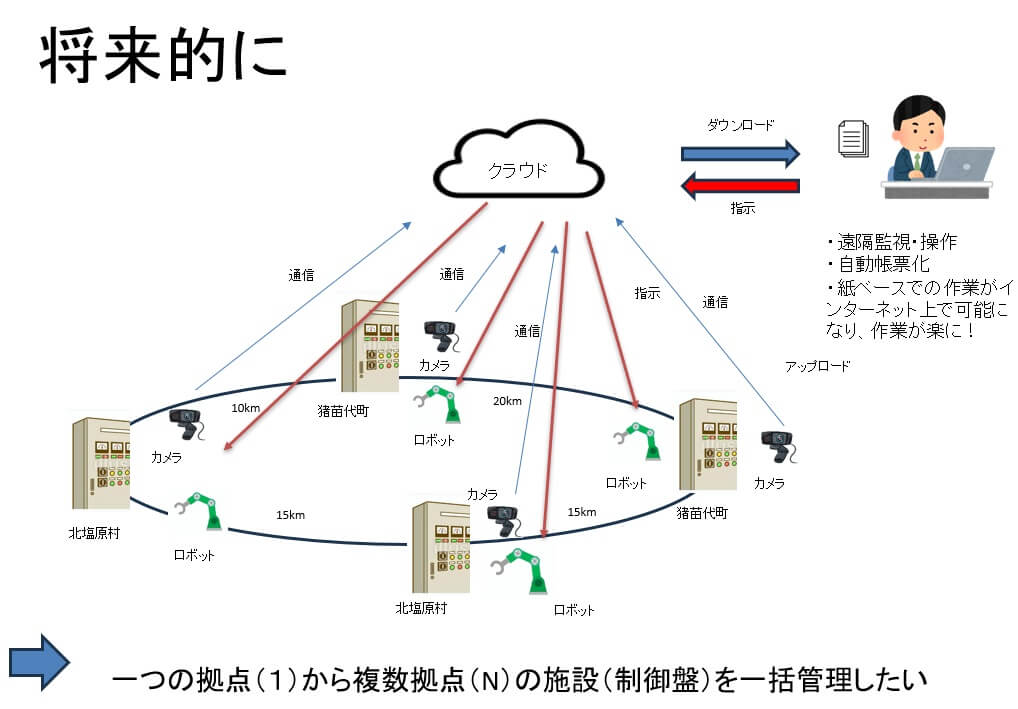 図5. 複数施設の一括管理
図5. 複数施設の一括管理
 図6. 通信環境の良くない過酷環境(豪雪地帯)
図6. 通信環境の良くない過酷環境(豪雪地帯)
 図7. CPS上でのロボットの制御
図7. CPS上でのロボットの制御
 図8. 複数施設でのロボットの実証実験
図8. 複数施設でのロボットの実証実験
アクアクルー株式会社
研究開発担当:佐藤 彰