1. はじめに
こんにちは、日本アドシスです。
当社は、福島県中通り(須賀川市)に本社を構えるソフトウェア開発会社です。2019年より「産学連携ロボット研究開発支援事業」において、会津大学と屋内搬送ロボットに関する研究開発を進めており、ここでは、自律型の屋内搬送ロボットに関する取り組み等について簡単にご紹介致します。
2. 自律型屋内搬送ロボット
研究開発用の屋内搬送ロボットは、Megaroverと呼ばれる台車ロボットを用い、ロボットの上部に設置した天板に、LiDARセンサ(VLP-16)を搭載する構成としております。また、基本技術にはROSのNavigation StackとSLAMを用い、空間内の環境地図の生成、及び自己位置の推定、有効経路内を自律的に走行するナビゲーションを実現しております。これまでには空間内の物体の性質(動的、静的、準静的等)により地図を分離し、レイヤー型の地図として用いることで、空間内をより適切に把握し、効率的なナビゲーションの実現に向けた研究開発も進めてきております。
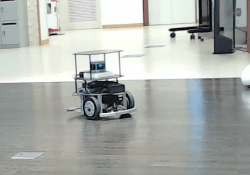
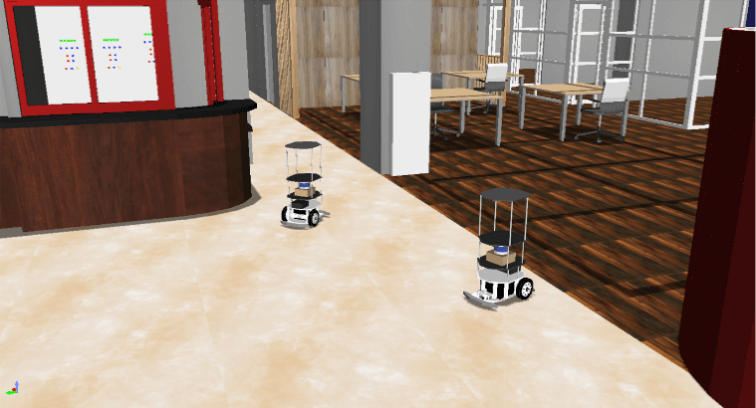
図1. 現実空間と仮想空間における自律型屋内搬送ロボット
3. 移動位置予測による経路計画機能
屋内搬送ロボットに経路指示等を与える経路計画機能は、クラウド上に位置し、空間内のロボットの管理・監視機能を提供しております。また、効率的な経路の導出を行う経路計画機能、導出した経路をロボットへ指示する経路指示機能等をWebブラウザ上から容易に操作可能とし、複数台の屋内搬送ロボットの研究開発の進展に努めているところです。
ロボットの走行可能経路は格子状経路として環境地図上に表現し、経路探索にはA*(A-Star)と呼ばれるグラフ探索アルゴリズムを用いて、最適な経路の導出を実現しております。また、走行するロボットの特徴(形状や速度等)と走行する経路等により、事前に各通過ポイントでの移動時刻を予測し、必要に応じて迂回経路を導出することにより、ロボット同士の衝突回避問題等についても研究開発を進めております。
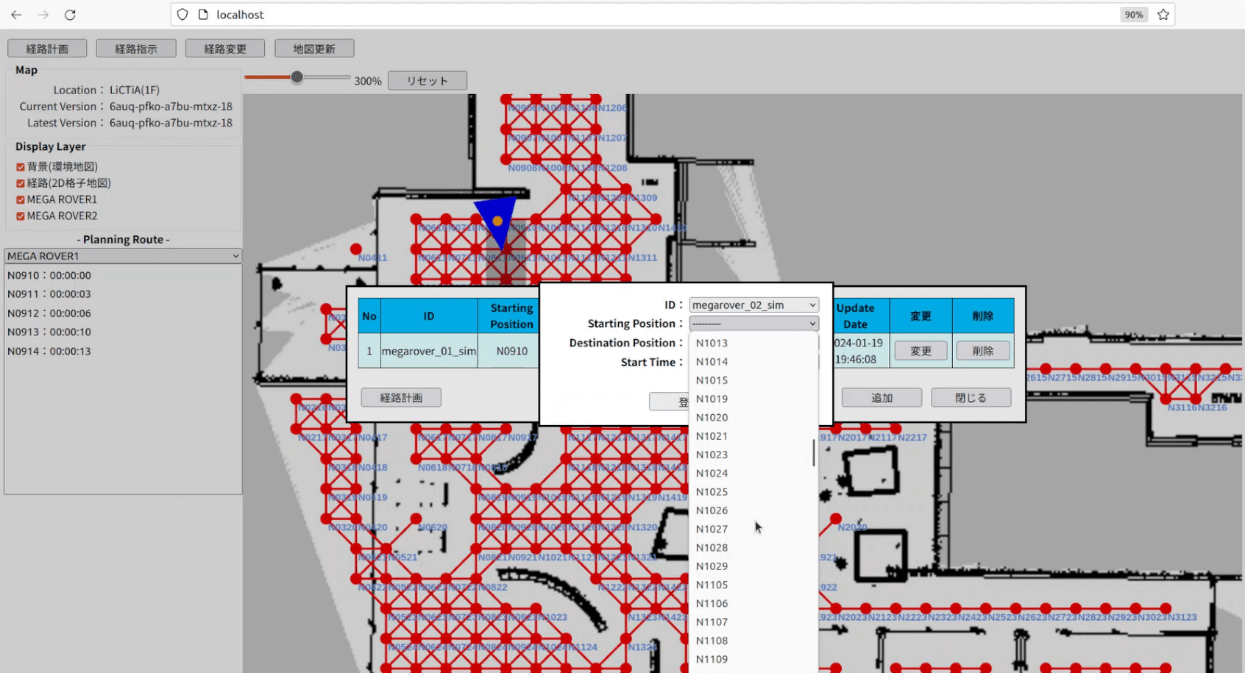
図2. 経路計画機能
4. 今後の取り組み
本年度は、物流倉庫のような広域空間での屋内搬送ロボットの導入に向けて、以下のテーマにより研究開発を進めております。
✔ 広域空間での地図の生成方法
✔ 局所的な環境情報の検出、及び広域地図への適用
✔ 不確実性を考慮した経路計画
広域空間では、リアルタイムでの環境の把握や地図の生成・更新方法等については課題も多く、ロボットが走行中に観測する局所的な環境情報(点群データ)の活用などによる解決策を見出したいと考えております。現在は、仮想空間上に物流倉庫を想定した検証環境を構築し、仮想空間での実験を通じて研究の進展に努めているところです。
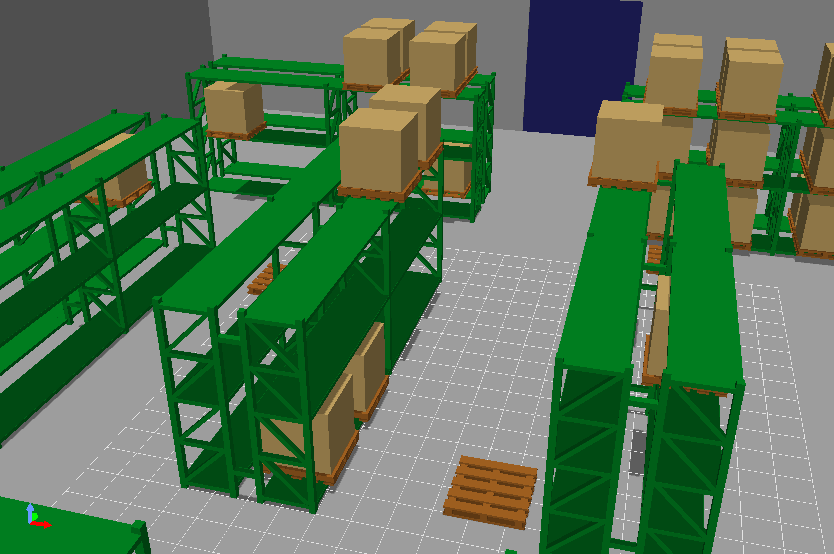
図3. 物流倉庫を想定した検証環境
5. 最後に
市場に向けては、これまでのソフトウェア技術を活用頂けるロボット開発会社様を募集しております。
ご興味のある企業様がおられましたら、お気軽にお声がけ頂ければと思います。
株式会社日本アドシス
研究開発担当:鈴木