1. はじめに
アクアクルー株式会社です。
弊社では、利水施設などを遠隔監視できるシステムの研究開発に取り組んでいます。
今回は一つの拠点から複数の施設をまとめて管理するシステムについて紹介します。
2. 目的および概要
私たちは山間部や豪雪地帯などにある利水施設を遠隔監視するために、図1のような一つの拠点から複数施設を一括管理できるようにしたいと考えています。管理施設は数十キロも離れた場所に点在しており、そこへ行くだけでもかなりの時間やコストがかかってしまいます。また、図2のような通信環境が不安定な地域も多く、現地での点検作業はなかなか大変です。
そこで、2025年度はこれまでに取り組んできた遠隔点検の成果を活かしながら、より効率的に設備を管理できる仕組みの実現を目指します。特に、シミュレータなどを活用して、実際の設備と仮想環境を連携させる「CPS(サイバーフィジカルシステム)」という考え方を取り入れ、検証作業を効率化していきます。
こうした技術を使うことで、遠く離れた複数の利水施設でも、遠隔で監視したり操作したりできるようにするのが目標です。今後は、より安全で、より効率的な施設運用を実現するために、引き続き技術開発と検証を進めていきます。
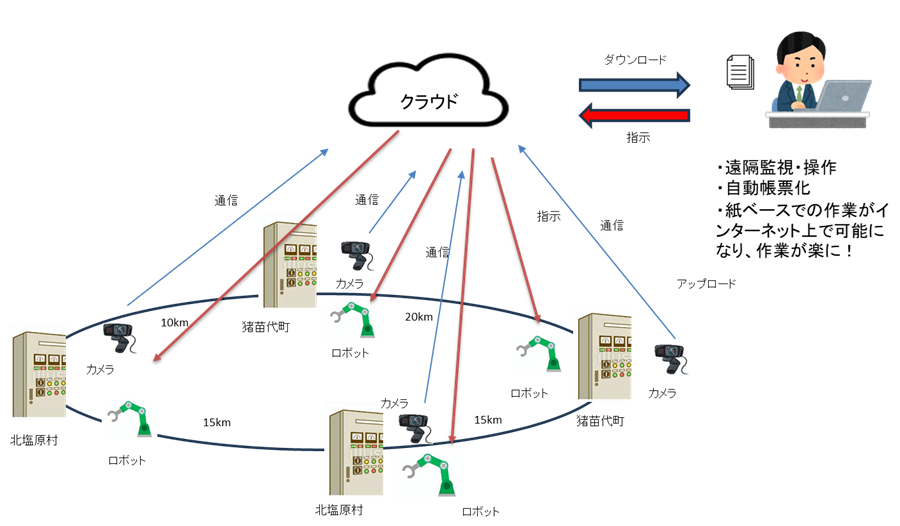
図1 複数施設の一括管理

図2 通信環境の良くない地域
3. シミュレータ環境を用いた開発
複数の施設を一つの拠点から効率よく管理するために、さまざまな工夫を重ねています。その一つが、仮想空間を使った事前検証の取り組みです。
現地の点検には時間も手間もかかります。特に、雪深い山間部や通信環境が不安定な地域では、ロボットの動作や遠隔操作の不具合が現地で初めて分かる、ということも少なくありません。そうしたリスクや手戻りを減らすために、私たちは「Choreonoid」(注)というシミュレータを活用しています。
Choreonoidを使えば、図3のような点検用ロボットや、図4のような施設内の制御盤などを仮想空間上に再現できます。この仮想空間で、事前に遠隔操作の動作確認や操作手順の検証を行うことで、現地に行く前に多くの課題を洗い出すことができ、現場での作業効率が大幅に向上します。
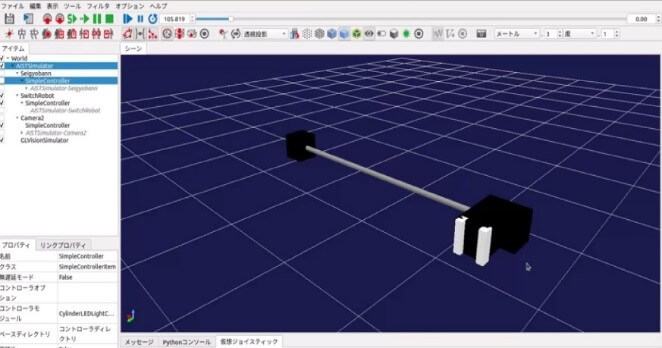
図3 遠隔操作ロボット
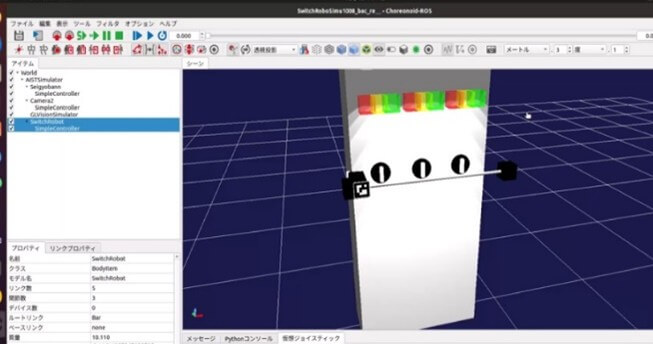
図4 点検設備
(注)Choreonoid: https://choreonoid.org/ja/
4. 実機環境を用いた2拠点施設の遠隔監視・操作
私たちは、図5に示す2つの施設を用いて、遠隔監視および遠隔操作の実証を行いました。ひとつは会津若松市内の施設で、操作拠点から5〜6kmと近距離に位置し、通信速度はおおむね200〜250Mbpsと安定しています。もう一方は北塩原村にある施設で、20〜30kmの距離があり、通信速度は5〜9Mbpsと低めです。しかし、通信速度が遅い北塩原村の施設でも遠隔操作によりスイッチの切り替えを行うことができています。
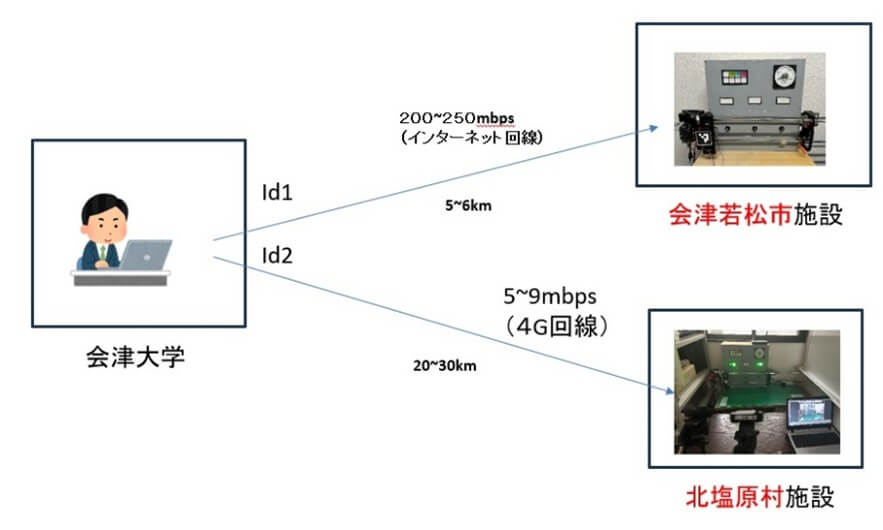
図5 2拠点遠隔監視・操作の試験環境
2024年度の北塩原村は特に降雪が多く、立ち入りが困難な日が続きました。そのような状況において、弊社で開発している遠隔IoRTシステムが有効であると考えています(図6)。
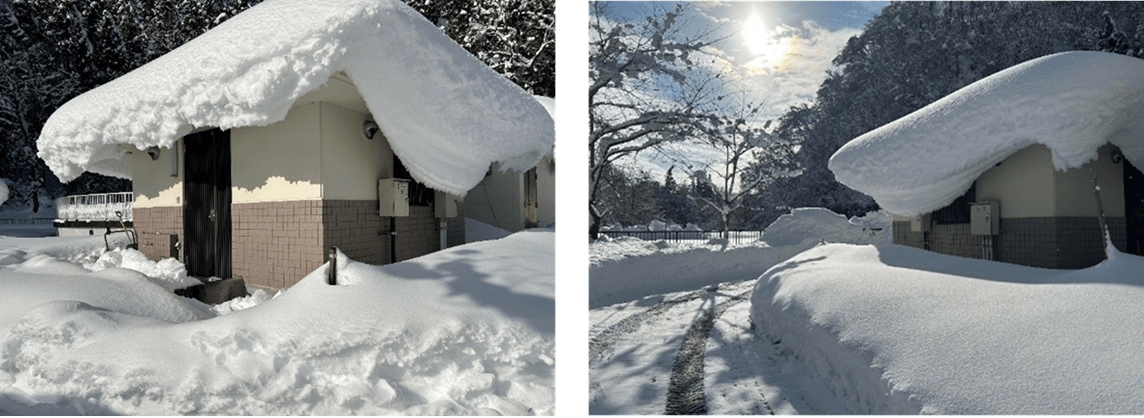
図6 2024年度の大塩浄化センターの様子
5. 実証試験
実際に遠隔操作による点検の実験を行いました。事前に仮想空間上でのシミュレーションを重ねていたことで、現地での操作もスムーズに進めることができました。
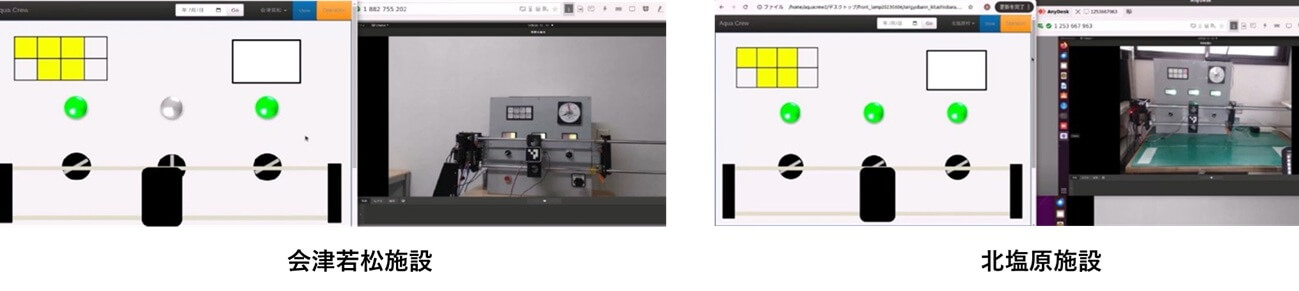
図7 会津若松・北塩原村施設での遠隔操作試験
こうした成果は、仮想と現実の連携が実証段階から実用化へと近づいていることを示しています。今後は、より現場に即した形での長時間動作の検証を行い、ロボットによる遠隔点検が日常の業務として定着するよう、研究と開発を続けていきます。
アクアクルー株式会社
問合せ:佐藤