1.はじめに
こんにちは、日本アドシスです。
当社は、福島県中通り(須賀川市)に本社を構えるソフトウェア開発会社です。2019年より「産学連携ロボット研究開発支援事業」において、会津大学と屋内搬送ロボットに関する研究開発を進めており、ここでは、LiDAR センサによる空間認識についてご紹介させて頂きます。
※研究の内容に関しては「自律型屋内搬送ロボットシステム」をご参照ください。
2.空間認識
空間内を自律移動ロボットが走行する上では、走行する経路の事前導出、走行中に検出した障害物回避等が必要です。本研究用のロボットは、LiDARセンサ(VLP-16)を搭載しており、走行中に捉えた空間情報(点群データ)により、地図生成や障害物回避を実現しております。なお、LiDARセンサに限らず、空間把握に使用できる測量機器には様々な種類(RGBカメラ、GNSS測量機等)がありますので、認識する空間に適切な機器を採用することも必要となります。
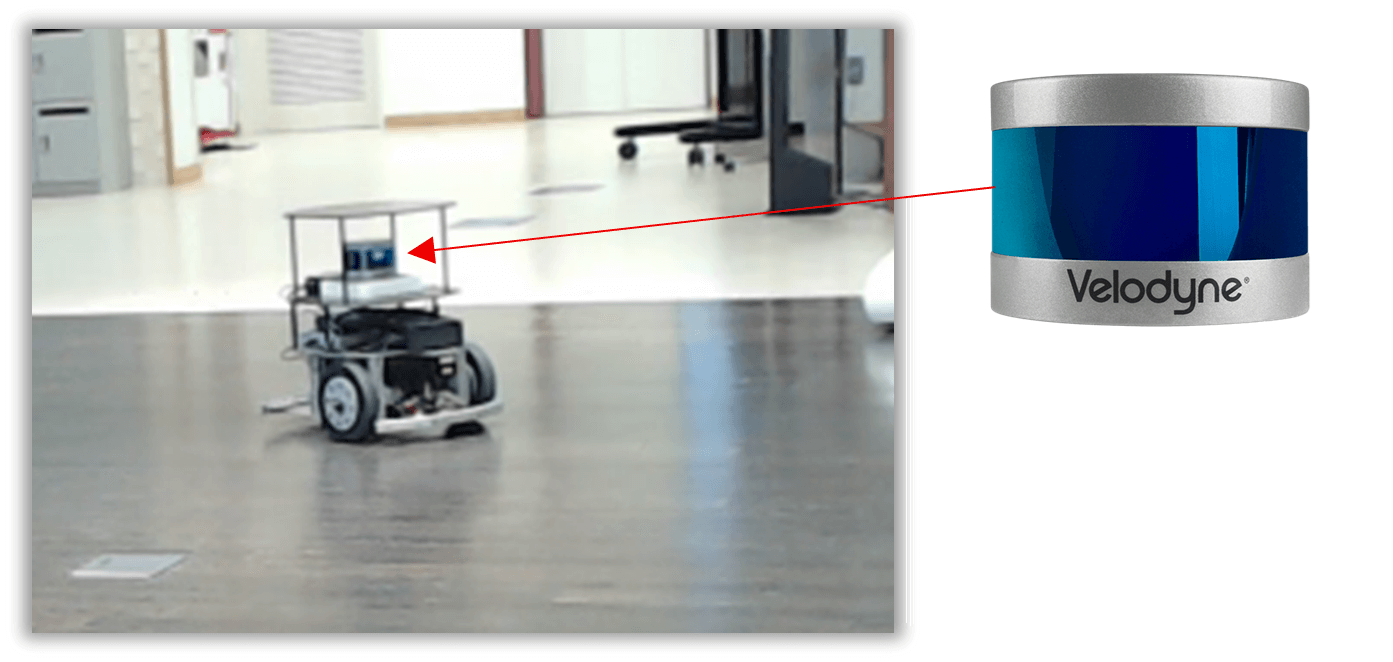
図 1 LiDARセンサ(VLP-16)を搭載した自律移動ロボット
3.ダウンサンプリング手法
LiDAR センサ(VLP-16)の製品仕様としては、毎秒30万個の点群データを出力することが可能ですが、全ての点群データを処理する上では、膨大な時間を要するものです。その為、ボクセルグリッドフィルタのようなダウンサンプリング手法を採用することも必要となります。ボクセルグリッドフィルタは、空間内に立方体のグリッドを配置し、そのグリッド内の点の重心を求めて、1点に数を減らす手法です。
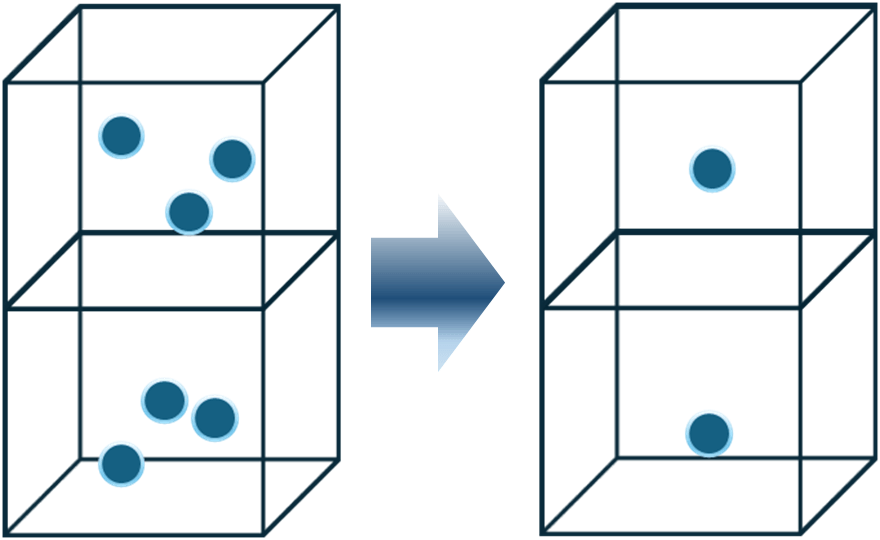
図 2 ボクセルグリッドフィルタによるダウンサンプリング
4.環境情報の不確実性
LiDAR センサで捉えた空間内の環境情報は、時間と共にその確実性は失われるものであり、広域な空間であれば、より失われるエリアは多くなります。もちろん、空間内を網羅するような、測量機器の設置は有効な手法ではありますが、設置箇所、設置する労力、コスト等、現実的な課題も考えなければなりません。また、自律移動ロボットが走行中に捉えた環境情報(点群データ)を利用することも必要ではありますが、ロボットの導入目的を損なわないようにしなければなりません。
そのため、本研究では空間内の不確実性の度合いをコストとして算出し、ロボットの経路導出の要素として利用することで、不確実性を考慮した経路導出を試みています。図3は、不確実性の度合いを色で表現したものですが、時間の経過と共に、空間内の確実性が変化している様子を示しています。色の濃淡は、時間の経過による変化を表しており、黒色が最も古く、白色が新しく観測された範囲であることを示しています。図中のRoute 1、Route 2は、搬送ロボット(●)がパレットまでの走行経路(同一距離)を示していますが、Route2には走行経路上に不確実性エリアを通過する区間が含まれていることが分かります。この不確実性をコストとして経路計画時の調整値として適用することで、ロボットの走行経路を変動させ、環境情報の確実性を意図的に高めることが出来るようになります。
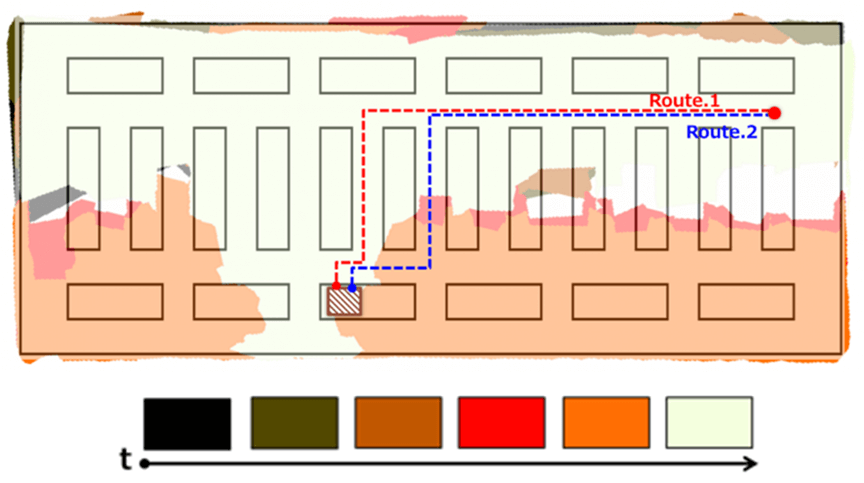
図 3 不確実性エリアマップと経路導出例
5.今後の取り組み
広域空間では、リアルタイムでの環境の把握や地図の生成・更新方法等について課題も多く、ロボットが走行中に観測する局所的な環境情報(点群データ)の活用などによる解決策を見出したいと考えております。本年度は、前述の要素技術をシステムに適用し、実証実験を試みることを予定しております。
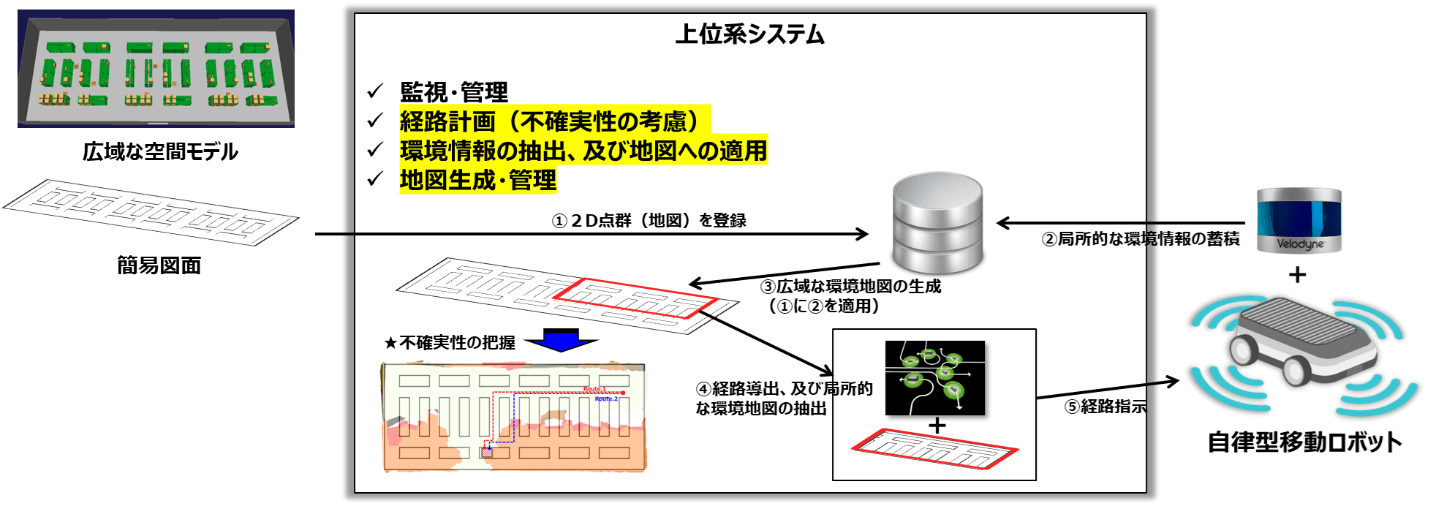
図 4 システム構成図
6.最後に
市場に向けては、これまでのソフトウェア技術を活用頂けるロボット開発会社様を募集しております。ご興味のある企業様がおられましたら、お気軽にお声がけ頂ければと思います。
株式会社日本アドシス
研究開発担当:鈴木