INDEX
目的
ロボット開発における研究分野は、これまでの機械工学や電気電子工学から、ソフトウェア工学、データベース、AIへと時代によってテーマが広がってきました。
コンピュータ理工学部のみの単科大学である会津大学では、コンピュータを通して、宇宙、環境、芸術などこれまで様々な分野にアプローチしてきましたたが、そのコンピュータ理工学に基づく研究や教育が、ロボット開発にもますます必要となってくるでしょう。
福島県は震災後、復興の構想のひとつとして、浜通り地域等に新たな産業の創出を目指すために「福島イノベーション・コースト構想」を発表し復興のための新たな産業基盤の構築の柱の一つとしてロボット・ドローンの産業集積を進めることにしました。
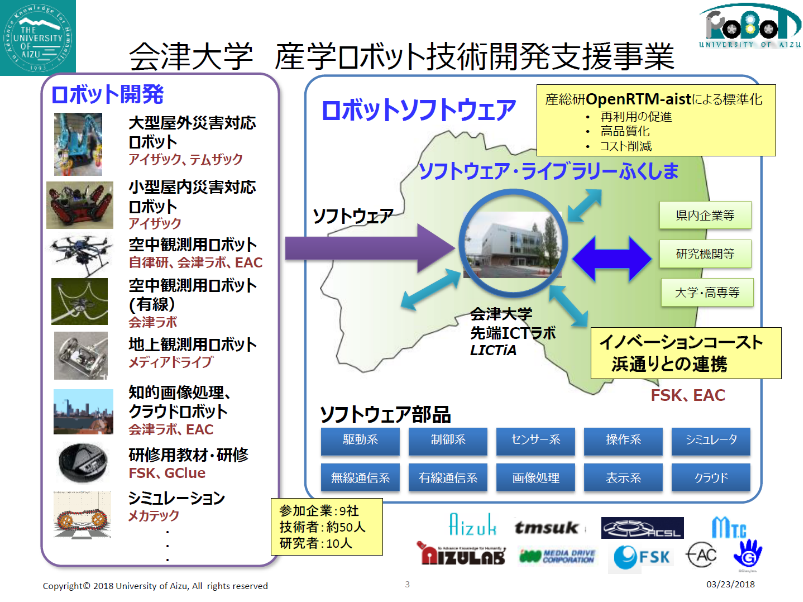
そして2015年4月、会津大学は福島県の補助事業「産学ロボット技術開発支援事業費補助金」の採択を受け、大学の有するICTに関する知見を生かした県内ロボット産業の振興を目指した研究開発を本格的に始動しました。
会津大学の挑戦
ロボットとは、「動け」という指令を発してから、実際に「動く」まで様々な技術が用いられています。
機械部品、電子回路、システム設計、通信ネットワーク構築、画像・地図を含む・あらゆる情報処理など、様々な技術の積み重ねでロボットは初めて動くことができます。
会津大学では、それらの技術開発をロボットの社会実装も視野に入れて 研究してきました。
その研究過程で開発したソフトウェアは、誰もが使えるよう標準化しました。それらはWEB上でライブラリとして整備され、情報公開しています。ウェブサイト「RTC-Library-FUKUSHIMA」は、英語と韓国語にも対応し、国内外からアクセスされています。
また、一時的な開発ではなく、これからのロボット開発を担う次世代の人材育成にも取り組んでいます。本学の学生のみならず、社会人等も対象に各種講習会を開催しています。
様々なプロジェクトが同時進行しています。それらは産官学で
進められ、互いの進捗状況を共有し、常に情報交換しています。
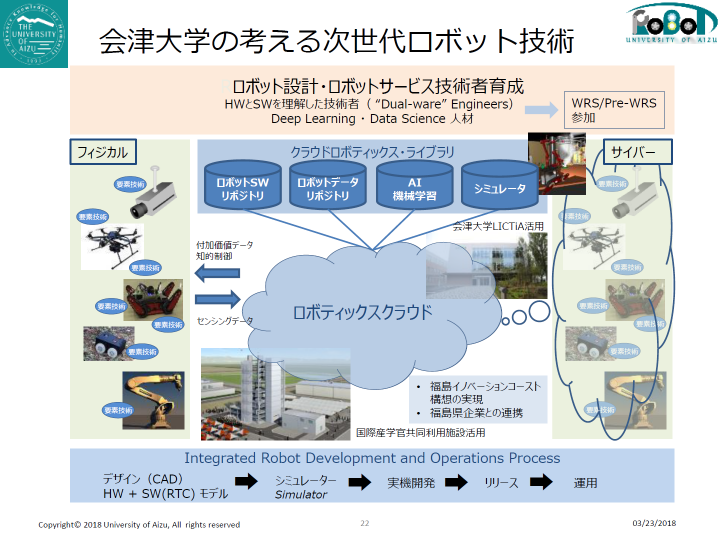
ロボットの設計(ハードウェア)からソフトウェア開発まで一貫して携われる人材の育成を目指しています。
ウェブサイト 「RTC-Library-FUKUSHIMA」
標準化したソフトウェアは、ライブラリとして誰でもホームページからダウンロードできます。このデータベースを活用し、事業者がロボットに適したプログラムを取り出し、組み合わせることで、新規ソフトウェア開発を容易にすることが可能となり、様々なロボットの効率的な開発及び品質向上に資することを目指しています。
2015年「RTC開発者全体会議」と称した、プロジェクトに関連する企業との情報交換会を開始しました。2016年には、「RTCライブラリふくしま研究会」へと改称し、各プロジェクトの成果報告のほか視察会、講師を招聘しての勉強会などを毎月開催しています。
(2020年現在は、名称を「会津ロボットデュアルウェア研究会(ARDuC)」とし、協力企業13社と国立研究開発法人産業技術総合研究所を含めた15団体が所属しています。)
研究開発
【ロボット開発】大型屋外災害対応ロボット 援竜
関係企業: (株)アイザック
援竜(T54-RTM)はゴムクローラーにより走行し、6軸油圧アームを2本搭載しており、瓦礫などを持ち上げることが可能。遠隔の専用操縦装置があり、7台のカメラにより周辺環境を確認しながらの遠隔操縦ができる。 GPSの読み取りRTC※を開発し、アームの状態表示用GUIを作成したことにより、ロボットの現在位置とアームの状態を遠隔地から確認することができる。加えて、俯瞰画像RTC群とデータを共有することで、援竜単体では取得できない環境情報を取得しながら、遠隔操作が可能。
※RTC: Robot Technology Component = ロボットミドルウェア標準OpenRTMに準拠したソフトウェア
【ロボット開発】小型屋内災害対応ロボット スパイダー
関係企業: (株)アイザック
遠隔操作により建屋内不整地踏破を目的とした、メインクローラ及びサブクローラを有する小型クローラロボット。6軸アームを2本搭載し、物体の把持や簡易な作業ができる。遠隔操作を補助するためのセンサとして、USBカメラ、9軸センサ、レーザレンジセンサ、GPS、TOFカメラを搭載。操縦はタブレット端末や、ゲームコントローラで可能。PCを搭載して、各クローラ動作の為のモータ、各種センサ情報、通信などを制御できる。
【ロボット開発】空中観測用ロボット ドロネットⓇ
関係企業: (株)会津ラボ
複数のドローンをケーブルにより接続し、ドローン間のケーブルの角度からドローン同士の距離を一定に保ち(水平方向制御)、角度差を用いた高度制御によって安定飛行を行うドローン制御方式。複数台のドローンを平行して飛ばすことによる作業効率の向上や重量物の搬送への応用、ケーブルに接続していることにより目視外への暴走防止などが実現できる。用途別に飛行形状を変えた群制御の飛行実証や電気自動車からの有線給電による長時間飛行など、インフラ点検などへの応用が可能。
【ロボット開発】地上観測用ロボット ゴローン
関係企業: (株)NTTデータNJK
地上での詳細な情報を収集(映像 音響 温度 湿度 風力 雨量 他)するIoT端末。ドローンなどから落下させるタイプ、地上移動タイプがある。 ビデオカメラ画像を利用して、TSCDP(会津大学の研究成果で動画像認識のアルゴリズム)で検出した動線を連結し、学習パターンとして登録する。登録された学習パターンと同じ動作が検出されると反応する。また、複数のゴローン同士で連携を取りながら協調動作を行う。
【ロボット開発】教育用ロボット ミニスパイダー
関係企業: (株)アイザック
スパイダーの小型版、教育用として開発された教材用小型電動クローラロボット。
ロボットの仕組みから、制御プログラムの構築までを一貫して行うことで、ロボット開発者に必要な【電気】【メカ】【制御】操縦技術を学習することができるハイレベルな教材用ロボット。高校生向けロボット技術者講習会での教材として活用した。また、展示会場でのデモンストレーション用として使用している。
【技術開発】ドローンを使用した技術開発(有線・無線通信ネットワーク、3D画像生成)
関係企業: (株)東日本計算センター
この研究では複数ドローンを使用した隊列飛行の実現を目指して、OpenRTM-aist※を使用してドローンを制御する開発や通信状況の精度を上げる開発、搭載したカメラによるリアルタイムな画像処理の開発を行った。これらは、
「WiFiによる無線群ドローンのOpenRTMによる表現」
「ロボット間通信のためのマルチホップ環境構築」
「移動ロボットのための画像処理による環境状況の可視化」 などの技術が含まれている。 短時間で広いエリアの撮影、広いエリアへの薬剤散布などに応用できる。
※OpenRTM-aist=独立行政法人産業技術総合研究所が主体となって開発を行っている。RTミドルウェア規格に基づき開発されたロボット技術用のミドルウェア
(https://www.openrtm.org/openrtm/)
 メッシュネットワーク
メッシュネットワーク
 2DCDPを用いた連続的な3D画像生成システムRTC
2DCDPを用いた連続的な3D画像生成システムRTC
【技術開発】画像処理に関する技術開発(3次元画像復元)
関係企業: (株)会津ラボ
単一のビデオから3次元画像を作成するために、Accumulated-Motion-Parallax(APM)メソッドとFrontward-Motion-Parallax(FPM)メソッドという2つのメソッドを提案した。単眼のカメラによる動画から、AMPは静的3次元画像を作成し、FMPは静的およびモーション3次元画像を作成できる。撮影した映像は、直下型のカメラに限らず、あらゆる方向からの映像に対応できる。この技術は、VR体験やそのシステム構築、自律ロボットの作業支援などに使用できる。
【技術開発】ソフトロボットシミュレータ開発
関係企業: (株)メカテック
ロボットの「設計」「動作分析」「自動制御」の検証のため、ロボットシミュレータを開発した。これまでのシミュレータは、変形を前提としない剛体モデルが対象だったが、タイヤ等の柔らかい弾性体の動作再現性が低いことが課題だった。ソフトロボットシミュレータ開発では、これを解決。ばねダンパによるひずみや収縮などの形状変化の詳細な表現、シミュレーションモデルの内圧の可視化、高解像度な数値解析データの提供を実現した。この技術は、教育用の作業教示シミュレータにも応用可能。シミュレータ上で事前に体感することで、人のノウハウを教示し、技能を技術として習得したり作業を効率化したりする手段としても期待できる。
【技術開発】クラウドとの連携
関係企業: (株)アイザック (株)会津ラボ (株)東日本計算センター (株)FSK (株)NTTデータNJK (株)メカテック
「クラウド連携」とは、複数の異種ロボットをクラウドを介して接続して、ロボットが取得した情報を他のロボットと共有することにより、より高度なサービスを提供できる統合ロボットシステムをさす。このシステムは、2017年度に行われた第2回と第3回の会津大学ロボットシンポジウムで公開デモンストレーションされた。どちらの事例でも、ミドルウェアを導入した異種複数ロボットクラウド連携システムにより、単体のロボットでは実現できないことが達成できることを示した。この開発は、ロボット事業の大きな達成点であるといえる。
【人材育成】RTC標準化とRTC-Library-FUKUSHIMAのウェブサイト整備
関係企業: (株)FSK (株)東日本計算センター
開発されたソフトウェアは、今後幅広く活用していただくために、標準化・共通化して整理しウェブで公開した。 これまでのロボット開発は、ひとつのロボットを開発するためにソフトウェアもそのつど新しく開発され、それらが他のロボット開発に使用されることが少なかった。標準化されたソフトウェアを再利用することにより、開発の効率化や品質の向上などが期待できる。ウェブサイト「RTC-Library-FUKUSHIMA」は、年間5000前後のアクセス数がある。
【人材育成】RTミドルウェア教育と講習会の展開
関係企業: (株)FSK
ロボット技術者育成の一環として、RTミドルウェア※1のひとつであるOpenRTM-aist※2の教育を講習会形式で実施した。RTミドルウェア講習会は、初級から上級までの3種類に分かれており、3年間でのべ143名が受講した。また、2018年3月には、ロボットハッカソントライアルを行い、設定されたコースの走破時間などを競った。この他にも、福島県からの依頼で「ロボット人材育成研修」の一部を担当した。
※1 RTミドルウェア=ロボットの機能要素ごとにソフトウエアモジュールを作り、それを複数組み合わせてロボットシステムを構築する為のソフトウエアプラットフォーム
※2 OpenRTM-aist=独立行政法人産業技術総合研究所が主体となって開発を行っている。RTミドルウェア規格に基づき開発されたロボット技術用のミドルウェア
(https://www.openrtm.org/openrtm/)
| 開催時 | 受講
レベル | 開催場所 | 受講者数 |
| 1 | 2015.6 | 初級 | 会津大学 | 20 |
| 2 | 2016.11 | 初級 | 会津大学 | 18 |
| 3 | 2016.12 | 初級 | いわき明星大学 | 17 |
| 4 | 2017.1 | 初級 | 日本大学工学部 | 16 |
| 5 | 2017.3 | 中級 | 会津大学 | 20 |
| 6 | 2017.8 | 初級 | 南相馬市 | 16 |
| 7 | 2017.9 | 中級 | 日本大学工学部 | 20 |
| 8 | 2017.12 | 上級 | 会津大学 | 16 |
【人材育成】研修用教材小型ロボットカー、研修用教材小型アームロボット
関係企業: (株)GClue
教育用ロボットは、「安価」で「身近」であることを最大の目的に開発された。どちらも、ホームセンターで入手できる部品や3Dプリンターでの製作部品で構成されている。また、OpenRTMに対応させることで、ソフトウェアの汎用性と再利用性の高いロボットキットを実現させた。
成果発表
2015年
- 8月 会津大学オープンキャンパス2015夏ステージ(会津大学)
- 10月 学園祭・会津大学オープンキャンパス2015秋ステージ(会津大学)
- 10月 会津IT秋フォーラム(会津大学)
- 11月 航空宇宙・ロボットフェスタふくしま2015(郡山市、ビッグパレットふくしま)
2016年
- 4月 国際ドローン展(千葉県、幕張メッセ)
- 6月 ロボットテストフィールドシンポジウム(南相馬市、テクノアカデミー浜)
- 7月 第1回会津大学ロボットシンポジウム(会津大学)
- 8月 オハラブレイク2016(猪苗代町、天神浜オートキャンプ場)
- 8月 会津大学オープンキャンパス2016夏ステージ(会津大学)
- 10月 学園祭・会津大学オープンキャンパス2016秋ステージ(会津大学)
- 11月 喜多方ものづくりフェア(喜多方市、喜多方プラザ)
- 11月 航空宇宙・ロボットフェスタふくしま2016(郡山市、ビッグパレットふくしま)
- 12月 福島県廃炉・除染ロボット技術等展示実演会(楢葉町、JAEA楢葉遠隔技術センター)
- 1月 Robodex2017(東京都、東京ビッグサイト)
2017年
- 5月 第2回会津大学ロボットシンポジウム(会津大学)
- 8月 オハラブレイク2017(猪苗代町、天神浜オートキャンプ場)
- 8月 会津大学オープンキャンパス2017夏ステージ(会津大学)
- 10月 学園祭・会津大学オープンキャンパス2017秋ステージ(会津大学)
- 10月 ロボコンinあいづ2017(会津大学)
- 11月 航空宇宙・ロボットフェスタふくしま2017(郡山市、ビッグパレットふくしま)
- 11月 国際ロボット展2017(東京都、東京ビッグサイト)
- 1月 Robodex2018(東京都、東京ビッグサイト)
- 1月 新技術説明会(東京都、JST東京本部)
- 3月 第3回会津大学ロボットシンポジウム(会津大学)
- 3月 福島県ロボット事業成果発表会(郡山市、ビッグパレットふくしま)
3年間の成果報告を行った「第3回会津大学シンポジウム」
学会発表、論文、特許
雑誌掲載
- Taku
Matsumoto, Yoshiaki Oyama, Jun Ogawa, Keita Nakamura and Keitaro Naruse,
"Modeling the drawbar pull of a rod wheel in loose soil", Journal of
Artificial Life and Robotics, Volume 22 Issue 4, December 2017, Pp.503-508,
(2017).
- Wuhui
Chen,Yuichi Yaguchi, Keitaro Naruse,Yutaka Watanobe, Keita Nakamura,
"QoS-aware Robotic Streaming Workflow Allocation in Cloud Robotics
Systems", IEEE Transactions on Services Computing, Volume: PP, Issue: 99,
(2018).
- Yuki
Niitsuma, Syunpei Torii, Yuichi Yaguchi, Ryuichi Oka, "Time-segmentation-
And position-free recognition from video of air-drawn gestures and
characters", Multimedia Tools and Applications, Springer, pp 1-25, May,
2015, DOI: 10.1007/s11042-015-2669-3
- 岡 嶐一、畠 圭佑、”ドロネット --有線結合ドローンネットワーク", 計測と制御、第56巻、第1号、2017年1月、pp. 40--43.
- Matsumoto, Taku, et al. "Mechanism of generating drawbar pull of rod wheel on loose soil." Artificial Life and Robotics 22.4 (2017): 503-508.
- W. Chen, Y. Yaguchi, K. Naruse, Y. Watanobe and K. Nakamura, "QoS-aware Robotic Streaming Workflow Allocation in Cloud Robotics Systems," in IEEE Transactions on Services Computing, vol. PP, no. 99, pp. 1-1. doi: 10.1109/TSC.2018.2803826
国際学会発表
2015年度
- K. Naruse, "Predicting the disconnection of flocking agents in a swarm," 2015 IEEE International Conference on Advanced Intelligent Mechatronics (AIM), Busan, 2015, pp. 1783-1788. doi: 10.1109/AIM.2015.7222805
- Yuichi Yaguchi, Yuta Hiroto, Takaaki Mamiya, Ryuichi Oka, "A Coarse-to-Fine Strategy for Full Pixel Image-Matching in High-Resolution Images," The 16th International Symposium on Advanced Intelligent Systems (ISIS2015)
2016年度
- H.
Nakazawa, K. Nakamura and K. Naruse, "Collision identification in weeding
robot with acceleration standard deviation," 2016 IEEE International
Conference on Robotics and Biomimetics (ROBIO), Qingdao, Dec. 2016, pp.
2026-2032. doi: 10.1109/ROBIO.2016.7866627
- C.
H. Pham, Y. Yaguchi and K. Naruse, "Feature Descriptors: A Review of
Multiple Cues Approaches," 2016 IEEE International Conference on Computer
and Information Technology (CIT), Nadi, Dec. 2016, pp. 310-315. doi:
10.1109/CIT.2016.61
- K. Nakamura, M. Kimura, T. Anazawa, T. Takahashi and K. Naruse, "Investigation of weeding ability and plant damage for rice field weeding robots," 2016 IEEE/SICE International Symposium on System Integration (SII), Sapporo, Dec. 2016, pp. 899-905. doi: 10.1109/SII.2016.7844114
- T. Matsumoto, Y. Oyama, K. Nakamura, K. Naruse, "Frequency Based Modeling of Drawbar Pull for Rod Wheel on Loose Soil“, ISAROB 2017, Jan. 2017
2017年度
- Nakamura,
Keita, Kizuku Mineta, and Keitaro Naruse. "Investigation of 3D Reconstruction
from Time-series Images by Towing Camera." IFAC-PapersOnLine 50.1 (2017):
10317-10322.
- W.
F. Shih, K. Naruse and S. H. Wu, "Implement human-robot interaction via
robot's emotion model," 2017 IEEE 8th International Conference on
Awareness Science and Technology (iCAST), Taichung, 2017, pp. 580-585. doi:
10.1109/ICAwST.2017.8256522
- Yuichi
Yaguchi, Yoshiaki Nitta, Satoshi Ishizaka, Tomohiro Tannai, Takaaki Mamiya,
Keitaro Naruse and Shuzo Nakano, "Formation control for different maker
drones from a game pad," 2017 26th IEEE International Symposium on Robot
and Human Interactive Communication (RO-MAN), Lisbon, 2017, pp. 1373-1378. doi:
10.1109/ROMAN.2017.8172483
- Y.
Yaguchi, K. Moriuchi and K. Anma, "Comparison of camera configuration for
real-time drone route planning in 3D building maze," 2017 IEEE 8th
International Conference on Awareness Science and Technology (iCAST), Taichung,
2017, pp. 244-249. doi: 10.1109/ICAwST.2017.8256455
- Haruna
Nakazawa, Jun Ogawa, Keita Nakamura and Keitaro Naruse, "Robot Sweep Path
Planning with Weak Field Constrains under Large Motion Disturbance," SWARM
2016, Kyoto, Japan, Oct., 2017
- Keisuke
Hamatani, Jun Ogawa, Keita Nakamura and Keitaro Naruse, "Distributed
Localization by Camera Robots with Consensus Filter," SWARM 2016, Kyoto,
Japan, Oct. 2017.
- Ryuhei
Yamada, Yuichi Yaguchi, Masashi Yoshida, "Performances of 3D mapping and
odometry tools, and of a visualization system for analyzing accidents of
unmanned aerial vehicles," ISAROB2018, pp. 389-394, Beppu, Japan, Jan.
2018.
- Ikumi
Otani, Yuichi Yaguchi, Keita Nakamura, Keitaro Naruse, "Quantitative
Evaluation of Streaming Image Quality for The Robot Teleoperation,"
ISAROB2018, pp. 230-235, Beppu, Japan, Jan. 2018.
- Fumiaki
Abe, Keita Nakamura, Jun Ogawa, Keitaro Naruse, "Stable Pulling Out
Strategy for Small Disaster Response Robot with Dual-arm," ISAROB2018, pp.
279-284, Beppu, Japan, Jan. 2018.
- Keitaro
Naruse, "Distributed Localization by Camera Robots with Consensus
Filter," ICDP 2018, Hokkaido, Japan, Mar. 2018.
- Keita Nakamura, Daisuke Kai, Kizuku Mineta, Jun Ogawa, Keitaro Naruse, "Improvement for 3D Reconstruction Considering Passive Rotation by Towing Camera," ICDP 2018, Hokkaido, Japan, Mar. 2018.
- Jun Ogawa, Miki Taira, Keita Nakamura, Keitaro Naruse, "Cellular Automaton Approach for Motion Pattern Analysis of Soft-bodied Agent," ICDP 2018, Hokkaido, Japan, Mar. 2018.
国内学会発表
2015年度
- 赤間裕平, 成瀬継太郎, "初期速度が群れ形成エージェントに及ぼす影響", 精密工学会学術講演会講演論文集 2015A 巻 (2015) M21, Sep. 2015.
- 赤間裕平,成瀬継太郎, "分離指標を用いた群れ形成 エージェントの制御,"
SI2015, 1A3-2, Dec. 2015.
- 嶺田築, 成瀬継太郎, "位置の距離を観測とするカ ルマン合意フィルタを用いた複数移動ロボットの位置推定," SI2015, 1A1-5, Dec. 2015.
- 横川真美, 成瀬継太郎, "Localization of mobile robot by using sensors and Kalman
filter," 平成27年度 第3回情報処理学会東北支部研究会, Jan. 2016.
- 間宮隆瑛, 矢口勇一, "Developing A Scheme of Controlling Drones using
OpenRTM-aist," 平成27年度 第3回情報処理学会東北支部研究会, Jan. 2016.
- 井上千徳, 矢口勇一, 佐藤彰, "Visualizing State Cluster of
Indicator Sequence in Sewage Treatment Facilities," 平成27年度 第3回情報処理学会東北支部研究会, Jan. 2016.
- 樋口彩, 矢口勇一, "2つの全方位カメラを用いた全方位距離画像生成," 平成27年度 第3回情報処理学会東北支部研究会, Jan. 2016.
- 伊藤諒平, 成瀬継太郎, "二足歩行機のスリップ発生時のエネルギー量の変化に基づいた制御と回復性,"
精密工学会学術講演会講演論文集 2016S 巻 (2016)
H06, Mar. 2016.
- 赤間裕平, 成瀬継太郎, "巨大群れ形成のための局所エネルギー制御," 精密工学会学術講演会講演論文集 2016S 巻 (2016) H20, Mar. 2016.
- 佐藤慎也, 矢口勇一, 奥平恭子, 出村裕英, "光学顕微鏡断層撮影に基づくシリカエアロゲル中にできた孔の 3 D 形状復元, " 第 78 回全国大会講演論文集 2016 (1), 237-238, Mar. 2016.
- 橋本真一, 矢口勇一, 成瀬継太郎, "ピクセルワイズな対応点からの 3 次元広域形状復元," 第 78 回全国大会講演論文集 2016 (1), 285-286, Mar. 2016. 2018.
2016年度
- 間宮隆瑛, 矢口勇一, 成瀬継太郎, 新田喜章,
"OpenRTM-aist を用いたドローン制御スキームの作成,"
ROBOMECH2016, ロボティクス・メカトロニクス講演会講演概要集 2016, 2P2-02b3,
Yokohama, Jun. 2016.
- 濱谷圭輔, 成瀬継太郎, "Topological distance に基づいた群れ形成アルゴリズム,"
ROBOMECH2016, ロボティクス・メカトロニクス講演会講演概要集 2016, 1A1-05a6,
Yokohama, Jun. 2016.
- 松本拓, 成瀬継太郎, "軟弱地盤におけるロッド車輪モデルの開発と検証,"
ROBOMECH2016, ロボティクス・メカトロニクス講演会講演概要集 2016, 1P1-04a6,
Yokohama, Jun. 2016.
- 中澤遥菜, 中村啓太, 成瀬継太郎, "加速度センサを用いた水田除草用ロボットの衝突識別判定," 精密工学会学術講演会講演論文集 2016A 巻 (2016) A15, Sep. 2016. [Best Presentation Award]
- 松本 拓, 中村啓太, 成瀬継太郎, "周期成分と非周期成分の分解による軟弱地盤に おけるロッド型車輪の駆動力モデルの開発と検証," RSJ2016, 第34回日本ロボット学会学術講演会, 3U1-03, Yamagata, Sep. 2016.
- 安間奎伍, 矢口勇一, 渡部有隆, 成瀬継太郎,
"RT ミドルウエアを用いたクラウドロボティクス開発基盤の考察," SI2016 計測自動制御学会
システムインテグレーション部門 講演会, 3G2-4, pp. 2557-2560, Dec. 2016.
- 井上 千徳, 矢口 勇一, 成瀬 継太郎, 渡部 有隆, 嶺田
築, Pham, Cuong, Hung, 濱谷 圭輔,
Pathberiyage, Venushka, Thisara Dharmasiri, 大山 良明, 中澤
遙菜, 間宮 隆瑛, 松本 拓, 安間 奎伍, 吉野 大志, 中村
啓太, "RT コンポーネントを用いたセンサーデータ収集基盤の開発,"
SI2016 計測自動制御学会 システムインテグレーション部門 講演会, 1N3-1, Dec. 2016.
- 阿部 文明, 中村 啓太, 成瀬 継太郎, "画像処理による遠隔操作アームのための把持点の提示, " 計測自動制御学会 東北支部 第305回 研究集会, 305-16, Nov. 2016.
- 嶺田 築, 中村 啓太, 成瀬 継太郎, "建物内の調査のための受動的な回転運動を行う牽引カメラによる3次元復元の検証," 計測自動制御学会 東北支部 第305回 研究集会, 305-17, Nov. 2016.
- 濱谷 圭輔, 中村 啓太, 成瀬 継太郎, "超分散カメラロボットによる自己位置推定," 計測自動制御学会 東北支部 第305回 研究集会, 305-18, Nov. 2016.
- 神ノ門 真吾, 大山 良明, 嶺田 築, 横川 真美, 松本
拓, 中澤 遥菜, 阿部 文明, 本多 健, 中村 啓太, 成瀬
継太郎(会津大学), "水田除草用ロボットのためのGPS測定装置による観測点分布の調査と要因解明," 計測自動制御学会
東北支部 第305回 研究集会, 305-19, Nov. 2016.
- 大山 良明, 松本 拓, 中村 啓太, 成瀬 継太郎,
"水田除草用ロボットのための ロッド車輪による土の掘り起こし体積の調査," 計測自動制御学会
東北支部 第305回 研究集会, 305-20, Nov. 2016.
- 嶺田 築, 成瀬 継太郎, 中村 啓太, "受動的な回転運動を行う牽引カメラによる時系列画像からの3 次元復元の検証," SI2016, 計測自動制御学会 システムインテグレーション部門
講演会, 1F4-1, Dec. 2016.
- 大山 良明, 松本 拓, 中村 啓太, 成瀬 継太郎,
"水田除草用ロボットに用いるロッド車輪の土による掘り起こし体積の調査," SI2016, 計測自動制御学会
システムインテグレーション部門 講演会, 2D1-2, Dec. 2016.
- 濱谷 圭輔, 中村 啓太, "超分散カメラロボットによる自己位置推定,"SI2016, 計測自動制御学会
システムインテグレーション部門 講演会, 1D3-2, Dec. 2016.
- 吉野 大志, 安間 奎伍, 成瀬 継太郎, 矢口 勇一, 渡部
有隆, 中村 啓太, "Solace を用いたOpenRTMaistのPub/Sub 型メッセージ通信の実装と応用,"SI2016, 計測自動制御学会 システムインテグレーション部門 講演会,
3G3-3, Dec. 2016.
- 森内啓介, 矢口勇一, "位置推定とデプスカメラを用いたドローンの3次元の逐次迷路探索," 平成28年度 第3回情報処理学会東北支部研究会, 3-1, Jan. 2017.
- 佐藤 拳, 大山 良明, 嶺田 築, 濱谷 佳輔, 中澤 遥菜, 阿部 文明, 中村 啓太, 成瀬 継太郎, "外部観測カメラによる水田除草用ロボットの自己位置検出," 平成28年度 第3回情報処理学会東北支部研究会, 3-2, Jan. 2017.
2017年度
- 吉田将司, 矢口勇一, "ドローンのための単眼カメラによる周辺環境の再構築,"
ROBOMECH2017, ロボティクス・メカトロニクス講演会講演概要集 2017, 2P2-A04,
May, 2017.
- 大谷育未, 矢口勇一, "FaBo センサの RTC 化による簡単なロボットプロトタイピング," ROBOMECH2017, ロボティクス・メカトロニクス講演会講演概要集
2017, 2A2-K12, May, 2017.
- 吉野大志, 渡部有隆, 矢口勇一, 中村啓太, 成瀬継太郎, "OpenRTM-aist における CORBA 通信とメッセージ Broker 付き Pub/Sub 型メッセージ通信による共存システムの可能性と応用例, " ROBOMECH2017, ロボティクス・メカトロニクス講演会講演概要集 2017, 2A2-J08, May, 2017.
- 安間奎伍, 矢口勇一, 渡部有隆, 成瀬継太郎,
"Cloud base の RTM 構築と Raspberry
Pi への自動デプロイ," ROBOMECH2017, ロボティクス・メカトロニクス講演会講演概要集 2017, 2A2-K07, May, 2017.
- 矢口勇一, 新田喜章, 石坂諭, 丹内智博, 間宮隆瑛, 成瀬継太郎, 中野 修三, ”異種ドローンによる複数台同時制御のための RT コンポーネント," ROBOMECH2017, ロボティクス・メカトロニクス講演会講演概要集 2017, 2A2-J11, May, 2017.
- W.
CHEN, Y. YAGUCHI, K. NARUSE, Y. WATANOBE, K. NAKAMURA, "Latency-Aware
Computation Offloading Algorithm for Cloud Robotics," The Proceedings of
JSME annual Conference on Robotics and Mechatronics (Robomech2018), 1P2-I02,
May. 2017,
- 矢口勇一, 森内啓介, "デプスカメラを用いたドローンの逐次三次元迷路探索," ROBOMECH2017,
ロボティクス・メカトロニクス講演会講演概要集 2017, 1P1-H08, May, 2017.
- 神ノ門真吾, 大山良明, 嶺田築, 横川真美, 松本拓, 中澤遥菜, 阿部文明, 本多健, 中村啓太, 成瀬継太郎,
"水田除草用ロボットのための複数GPS 測定装置による観測点分布の調査," ROBOMECH2017, ロボティクス・メカトロニクス講演会講演概要集
2017, 1A1-D03, May, 2017.
- 濱谷圭輔, 小川純, 中村啓太, 成瀬継太郎, 尾川順子, 久保田孝, "コンセンサスに基づいた超分散カメラロボットによる自己位置推定," ROBOMECH2017, ロボティクス・メカトロニクス講演会講演概要集
2017, 2A1-H09, May, 2017.
- 中澤遥菜, 小川純, 中村啓太, 成瀬継太郎,
"掃引ロボットの移動誤差を考慮した経路計画の提案," ROBOMECH2017, ロボティクス・メカトロニクス講演会講演概要集 2017, 2P1-H04, May, 2017.
- 田村雄介ら (13: 成瀬継太郎), "福島第一原子力発電所の廃止措置のための遠隔操作技術の開発と人材育成,"
ROBOMECH2017, ロボティクス・メカトロニクス講演会講演概要集 2017, 2P1-R01,
May, 2017.
- 阿部文明, 中村啓太, 小川純, 成瀬継太郎, "大型遠隔操縦ロボットのためのHough 変換を用いた楕円検出による対象物把持点の提示,"
ROBOMECH2017, ロボティクス・メカトロニクス講演会講演概要集 2017, 2P1-R09,
May, 2017.
- 松本拓, 大山良明, 小川純, 中村啓太, 成瀬継太郎, "土壌との相互作用を考慮したロッド型車輪の駆動力発生メカニズムのモデリング,"
ROBOMECH2017, ロボティクス・メカトロニクス講演会講演概要集 2017, 2P2-C08,
May, 2017.
- 大山良明, 中村啓太, 小川純, 松本拓, 成瀬継太郎, "土壌粒子との相互作用を考慮したロッド車輪による掘り起こし体積のモデル化,"
ROBOMECH2017, ロボティクス・メカトロニクス講演会講演概要集 2017, 2P2-C09,
May, 2017.
- Ryuichi
Oka, Ranaweera Rasika, "Region-wise 3D Image Reconstruction from Video
Based on Accumulated Motion Parallax",
MIRU 2017, PS1-5 2017,08/08.
- 佐藤 拳, 大山 良明, 嶺田 築, 濱谷 圭輔, 横川
真美, 松本 拓, 中澤 陽菜, 阿部 文明, 神ノ門 慎吾, 本多
健, 中村 啓太, 成瀬 継太郎, "外部観測カメラによる水田除草用ロボットのナビゲーション," 精密工学会学術講演会講演論文集 2017S
巻 (2017), A15, Sep. 2017.
- 神ノ門真吾, 小川 純, 阿部文明, 中村啓太, 成瀬継太郎, "RTK-GNSS によるアイガモロボットの制御のための測位精度の検証,"
精密工学会秋季大会学術講演会, I33, Sep. 2017.
- 横川真美, 小川 純, 中村啓太, 成瀬継太郎,
"拡張カルマンフィルタと慣性センサを用いた水田除草ロボットの3次元姿勢推定," 精密工学会秋季大会学術講演会, Sep. 2017.
- 中村啓太, 小川 純, 成瀬継太郎 , "進化ロボティクスにおけるコーチングに基づいた行動パターンのラベリング," 精密工学会秋季大会学術講演会, Sep. 2017.
- 小川 純 , 平 美記, 中村啓太, 成瀬継太郎,
"弾性体ボクセルを用いたクローラロボットシミュレーション," 精密工学会秋季大会学術講演会, Sep. 2017.
- 吉野 大志, 渡部 有隆, 矢口 勇一, 中村 啓太, 小川
純, 成瀬 継太郎, "メッセージBroker 間のブリッジを応用したRT ミドルウェアにおけるPub/Sub 型通信インタフェース," SI2017, 計測自動制御学会 システムインテグレーション部門 講演会,
3B1-04, Dec. 2017.
- 小川 純, 中村 啓太, 成瀬 継太郎,
"固定トポロジーの結合振動子系による生物表現," SI2017, 計測自動制御学会
システムインテグレーション部門 講演会, 3C6-10, Dec. 2017.
- 阿部 文明, 中村 啓太, 小川 純, 成瀬 継太郎,
"双腕ロボットのための急激な回転中心の変化を考慮した安定引き抜き戦略," SI2017, 計測自動制御学会
システムインテグレーション部門 講演会, 3C6-15, Dec. 2017.
- 中澤 遥菜, 中村 啓太, 小川 純, 成瀬 継太郎, "移動が不確実であるロボットのための確率論に基づいた経路計画," SI2017, 計測自動制御学会 システムインテグレーション部門 講演会, 3C6-17, Dec. 2017.
- 大谷 育未, 中村 啓太, 矢口 勇 一, 成瀬 継太郎, "ベンチマークに基づいたロボットの操作性と映像遅延の関係," 日本機械学会東北学生会 第 48 回学生員卒業研究発表講演会, 602, Mar. 2018.
特許
| 出願提出日 | 出願番号, 出願者 | 発明の名称(備考) |
| 2015年9月9日 | 特願2015-177680
岡 嶐一 | ドローン及びドローン群(Dronet) |
| 2016年9月1日 | 特願 2016-170795
岡 嶐一 | 画像距離算出装置、画像距離算出方法および画像距離算出用プログラム (AMP) |
| 2017年8月21日 | 特願 2017-158781
岡 嶐一 | 画像距離算出装置、画像距離算出方法および画像距離算出用プログラム
(AMP 国内優先権主張出願) |
| 2017年8月28日 | PCT/JP2017/030813
(国際出願番号)
岡 嶐一 | 画像距離算出装置および画像距離算出用プログラムを記録した
コンピュータ読み取り可能な非一過性の記録媒体 (AMP 国際特許出願) |
| 2017年10月2日 | 特願 2017-192767
岡 嶐一 | 音声認識装置および音声認識プログラム (音声) |
| 2017年12月7日 | 特願 2017-235198
岡 嶐一 | 動画像距離算出装置および動画像距離算出用プログラム (FMP) |
商標登録
| 登録日 | 商標登録 | 商標登録番号 |
| 2016年9月 9日 | ポリドロネット
polydronet | 第5880813号 (T 5880813) |
| 2016年10月28日 | ドロネット
dronet | 第5891570号(T 5891570) |
プロジェクト関連財源
- 産学ロボット技術開発支援事業費補助金(研究期間: 2015年4月 - 2018年3月)
- 産学連携ロボット研究開発支援事業補助金(研究期間: 2018年4月 - 2021年3月)
- 学等の「復興知」を活用した福島イノベーション・コースト構想促進事業(採択期間: 2018年度 - 2020年度)
2015年~2017年 その他の共同研究
- 農作業支援ロボット(水田除草ロボット)の開発
- カメラ等のセンサを利用したマルチコプタの位置・姿勢決定
- 超分散ロボット群による三角測量に基づく自己位置推定と地図生成
- 「3Dマッピング技術を用いて得られる3D地形データのサンプル収集とデータ処理」
- OpenRTMとROS2の相互運用に関する研究
- 標準車輪型・クローラ型ロボットモデルとそれらのシュミレーションコンテンツ構築及びシミュレーション精度検証
卒業生の声
阿部 文明
博士前期課程修了(修士)
勤務先:国立研究開発法人日本原子力研究開発機構
学生時代はロボットアームの制御や画像処理に関する研究を行なっていました。
研究以外にも、ロボットの競技会や講習会への参加を通じてロボットを作ることの楽しさや難しさを経験することができました。
現在は、福島第一原子力発電所の廃炉作業で利用されるロボットを遠隔操作するオペレータの訓練に貢献するため、シミュレーション技術を活用した訓練システムの研究開発を行なっています。
研究活動に勤しみ、廃炉作業ひいては福島県の復興に貢献していきたいです。
神ノ門 真吾
博士前期課程修了(修士)
勤務先:株式会社マキタ
学生時代は、GNSS(衛星測位システム)を用いた水田除草用ロボットの自律走行の研究をしていました。
研究室では、自身の研究だけでなく様々なロボットコンテストや産学共同プロジェクトなど幅広く経験することができ、とても充実していました。
電動・園芸工具業界もロボット化が進んでおり、現在の勤め先でもROS(ロボット用標準ソフトウェア)を使った先行開発のコンセプト検証やモータの組み込み制御等、大学の授業や研究室で学んできたことを活用しています。
遠橋 健太
博士前期課程修了(修士)
勤務先: 株式会社牧野フライス製作所
私は主に小型屋内災害対応ロボットのソフトウェア開発を行っていました。災害対応ロボットに関するコンテストで他チームと競い合い、私たちの技術で自らの目標を達成することにやりがいを感じていました。産学連携で地元企業の方々と一緒に進めていくので、学生でありながら一歩社会人に近いところで活動できたと思います。この経験を生かして、今後の社会人生活で活躍していきたいと考えています。
研究者紹介
成瀬 継太郎 教授
情報システム学部門 ロボット工学講座
→HPへ
渡部 有隆 上級准教授
情報システム 学部門 データベースシステム学講座
→HPへ
矢口 勇一 准教授
情報システム学部門 ロボット工学講座
→HPへ
中村 啓太 准教授
情報システム学部門 データベースシステム学講座
会津大学ロボットテストフィールド研究センター(南相馬市)勤務
→HPへ
山田 竜平 准教授
復興支援センター
会津大学ロボットテストフィールド研究センター(南相馬市)勤務
→HPへ
岡 嶐一 特任教授
産学イノベーションセンター
→HPへ
協力企業紹介