デモンストレーション概要
※このイベントは終了しています
日 程:2022年3月10日(木)14:00~
場 所:福島ロボットテストフィールド(南相馬市)
会津大学 LICTiA1階(会津若松市)
災害地域や事故現場、または月惑星や極域など、人が活動を行うのに危険を伴う場所、人が行きづらい場所では、ロボットを利用して、遠隔地からの制御で作業を行う事が有効な手段となる。一方、このような極限環境では、一般に通信環境が良好でなく、頻繁な通信による制御が困難である事が予測されるため、ロボットが極力、自律的な移動・作業を行える事が重要となってくる。
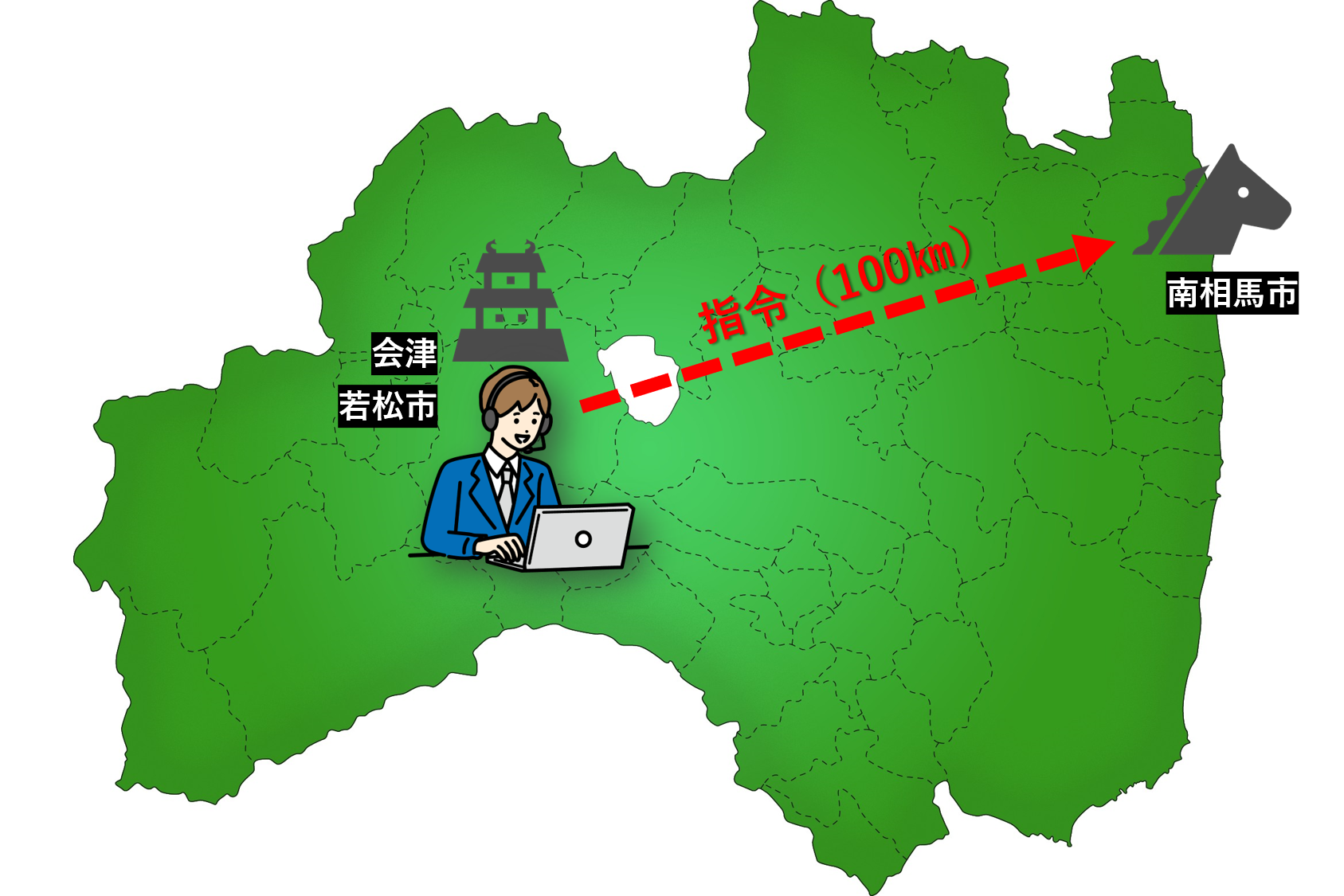
そこで我々は、ROS*とMQTT*を組み合わせた新しい遠隔自律移動システムを開発し、会津-南相馬間でロボットを動かすデモンストレーションを実施した。このデモでは、制御用のPCを会津大学に配置し、ロボットを南相馬の福島ロボットテストフィールド(RTF)に設置して、会津大からコマンドを送り、RTF内のロボットが自律移動を行えるようにした。そして、我々のシステムを使い、会津大からの制御で、直線距離で約100km離れた南相馬のロボットを問題なく自律移動させられる事を実証した。
※ROS(Robot Operating System)とは、 ロボット用のソフトウェアプラットフォームのこと
※MQTT((Message Queueing Telemetry Transport)とは、TCP/IPネットワークで利用できる通信プロトコルのこと
ロボット紹介
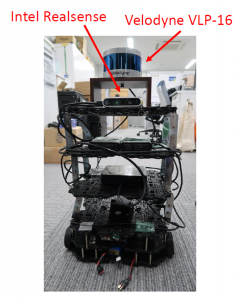
〈自律移動試験用ロボット〉
◎Turtlebot3 Waffle-pi をベースに作成
Turtlebot3は研究教育用に汎用的に使用されるロボットであり、ROSの自律移動パッケージ(Navigation Stack)による運用が比較的容易
◎3次元LIDAR(Velodyne-VLP16)と可視光カメラ(Intel Realsense D435i)を搭載
3次元LIDARデータを使用して地図生成と、自律移動時の障害物検出、自己位置推定を実施。搭載カメラ画像で遠隔地の様子のモニタリングが可能
◎2次元グリッドマップ上でWaypointを指定しての自律移動が可能
ROS-Navigation Stackを使用して、2次元地図上で指定した複数のWaypoints(座標)を経由しての自律移動が可能
システム構成
本システムの最大の特徴はロボットオペレーションで一般的に使用されるミドルウェアであるROSのデータ形式を、同じくIoTプロトコルとしてスタンダートなMQTTのメッセージに変換して、MQTTで通信を行うことにより、インターネットを経由しての遠隔地のROSベースのロボットのセキュアーで安定した制御を可能とした事である。また、会津大で開発したロボットクラウド(Robot Data Repository: RDR)との接続も可能とし、RDR中で生成、格納された地図データをダウンロードして自律移動を実施できるようにした事も特徴である。
◎PC構成
・コントロールPC …会津大に設置、Ubuntu18.04 ROS-Melodic導入
・ロボットPC…福島RTFのTurtlebot3上に搭載。Ubuntu18.04 ROS-Melodic導入
◎自律移動システム
・ROSのNavigation-Stackを使用
◎データ通信
・ROSの自律移動用トピックをMQTTメッセージに変換
・MQTT-bridge、MQTT-serverを介してインターネットを超えてメッセージを送信
・送信したメッセージをROSトピックに変換して受信
◎ロボットクラウド (Robot Data Repository: RDR)
・ロボットに搭載した3次元LIDARデータを入力して、クラウド内部で3次元点群地図を生成。3次元点群地図から2次元グリッドマップへの変換処理が行われ、ユーザからの要求によりHTTP経由で2次地図が自律移動用にコントロールPCにダウンロードされる
⇒⇒⇒詳細は、当日のスライド資料をご覧ください
まとめ

会津大学 情報システム学部門
准教授 山田 竜平
今回、我々の開発したROS-MQTTブリッジシステムにより、会津からのコントロールで南相馬にあるロボットの自律移動に成功した。このシステムはインターネットがつながる環境であれば、どこでも安定した制御を実現でき、例えば、家庭やオフィスのサービスロボット等に応用できる。一方、我々が目指すターゲットは、災害地域や月惑星等の極限環境である。Turtlebot3をこのような不整地で動かすのは難しいので、今後、不整地用の探査ロボットの開発を行うと供に、インターネットがつながりづらいような環境下でも遠隔によるコントロールを実現できるようなシステムへと発展させていきたい。