2.プロジェクトファイル作成
以下のコマンドでChoreonoidを起動します。
$ cd ~/choreonoid/build/bin/
$ ./choreonoid
起動すると以下の画面が表示されます。
図2-1 Choreonoid: 起動画面
2.1 ワールドの作成
起動後、左上の[ファイル]→[新規]→[ワールド]でWorldを生成します。
生成時にワールドアイテムの名前を聞かれるのでデフォルトのままで生成してください。
2.2 モデルを読み込む
左のアイテム欄のWorldにチェックを入れてください。
その後、Worldを選択した状態で、[ファイル]→[読み込み]→[ボディ]で使用するモデルファイルを読み込みます。
モデルファイルは以下の場所にあります。
・floor.body
[choreonoid/share/model/misc]
・EV3.body
[1.モデルのダウンロード]で、解凍したフォルダ内にあります。
下の画像がモデルの読み込みまで完了した状態です。
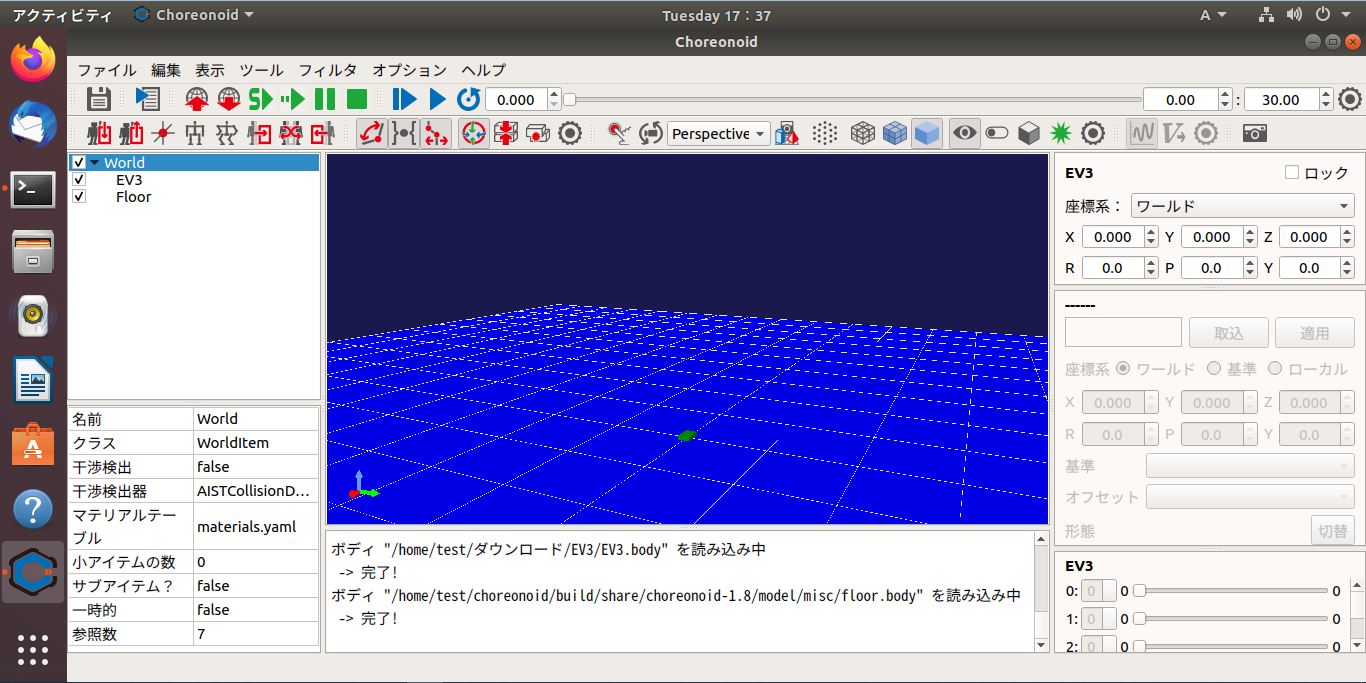
図2-2 Choreonoid: モデル読み込み[シーン]内の緑の物体がEV3.bodyモデル、青いタイルがfloor.bodyになります。現時点では小さいので拡大して確認してください。
拡大・縮小はマウスホイールで行うことができます。視点の変更は画面をクリックした状態でマウスを動かします。
2.3 RTシステムとAISTシミュレータの読み込み
OpenRTMと物理エンジンを使用するために、以下の機能を読み込みます。
・RTシステム
[ファイル]→[新規]→[RTシステム]でRTシステムを生成します。
・AISTシミュレータ
[ファイル]→[新規]→[AISTシミュレータ]でシミュレータを生成します。
生成すると以下の画面のようにアイテム欄に追加されます。
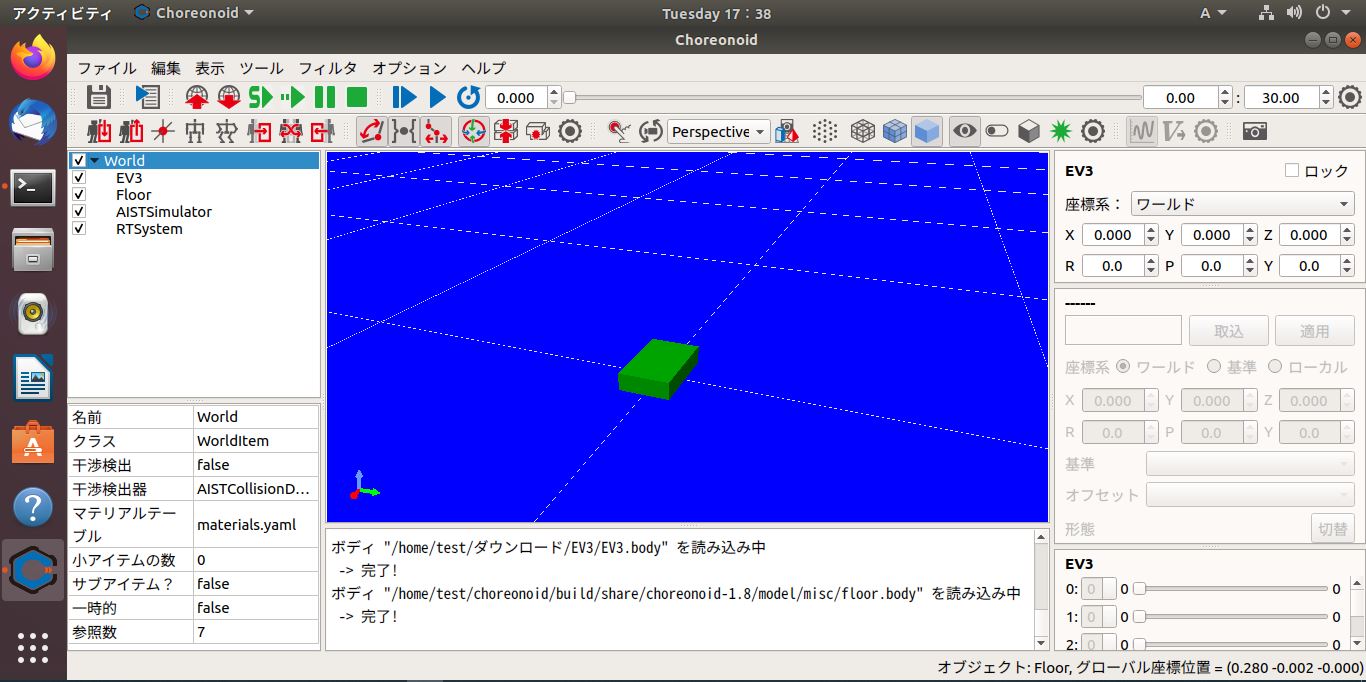
図2-3 Choreonoid: AISTシミュレータとRTシステム読み込み
2.4 モデル位置の変更
現在EV3のモデルが地面に埋まっている状態なので、モデルのZ座標を変更します。
①モデルのZ座標を変更
画面右の配置ビューの「ロック」のチェックを外し、Zを0.15に変更してください。モデルの位置が変わります。
②初期位置の変更
「現在の状態をワールド初期状態に設定」ボタンを押して設定を適用します。これを行わないとシミュレーション開始時にEV3モデルが埋まっている状態に戻ってしまいます。
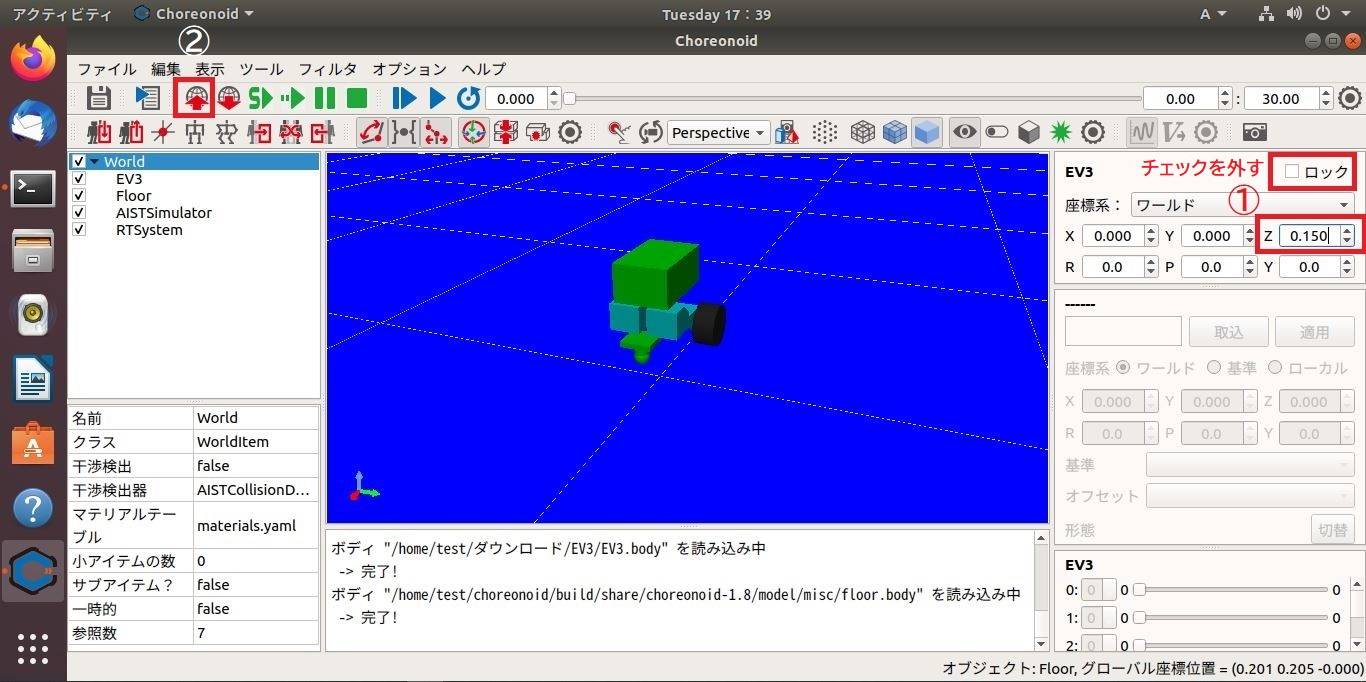
図2-3 Choreonoid: モデル位置の変更
2.5 BodyIoRTC設定
アイテム欄の[EV3]を選択した状態で[BodyIoRTC] を生成します。
生成方法は[ファイル]→[新規]→[BodyIoRTC]を選択して行います。名前はデフォルトのままで大丈夫です。
その後、EV3モデルを制御するためのRTCモジュールを追加します。
追加方法は下の画面の赤枠[RTCモジュール]をクリックして選択ダイアグラムで[EV3IoRTC.so]を選択します。
[EV3IoRTC.so]は「1.EV3モデルのダウンロード」で解凍したEV3モデルフォルダ内にあります。
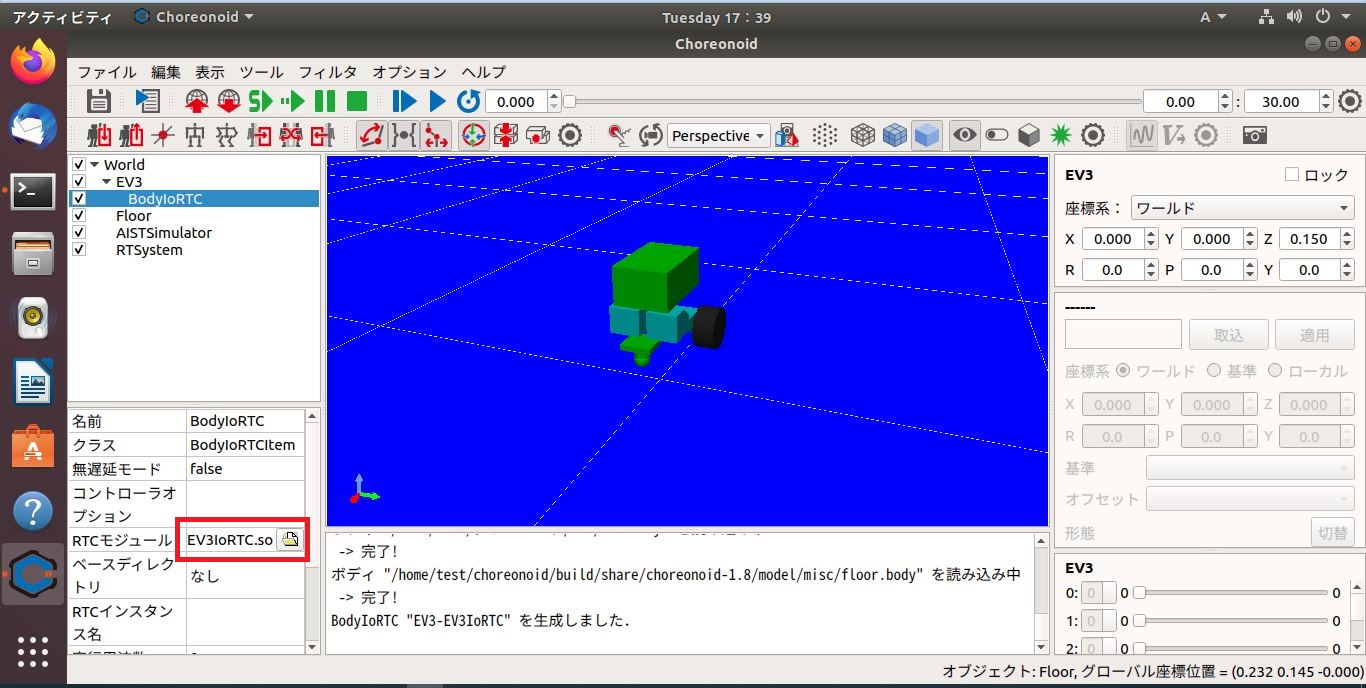
図2-4 Choreonoid: BodyIoRTC追加