
紹介動画ピックアップ
会津大学では2015年度より産学連携によるロボットシステムの研究開発を行っています。本ページは2019年の成果をまとめたものです。
私たちは情報システムやソフトウェアの面からロボットの機能強化を目指しており、複数のロボットシステムがネットワークで結合することでより大きな機能を実現するクラウドロボティクスのための技術開発を行っています。その際に重要になるのが実際のロボットからのデータの活用と仮想化技術であり、私たちはロボットデータレポジトリ(RDR)と名付けた、ロボットのための新しいデータベースシステムを中心にクラウドロボティクス技術の研究・開発を行っています。
そして、これらの概念に基づいたソフトウェアを災害対応ロボットとサービスロボットに実装し、実験や検証を行いましたので、ここではそれらの成果も発表します。
さらに上のような新しいロボット技術を普及するためには、新しい技術を知ったエンジニアが必要になります。私たちはそのための人材育成事業も行っており、その活動も紹介します。
概要
はじめに
図1に私たちが開発しているデータ中心型クラウドロボティクスの概念図を示します。
従来のロボットシステムは図の左側の「ローカル実装」と呼ばれる構成が多く、ここでのロボットはセンサやアクチュエータとともにコンピュータを含み、必要な情報処理はロボット内部で行います。この実装は高速な処理やセキュリティの面で優れており、多くの自律ロボットはこの方式で実現されています。しかし、この方式ではロボットが外部を知るためにはセンサで観測するしかなく、狭い範囲しか知ることができません。
一方、スマートフォンに代表されるように、多くの情報システムはインターネットを利用して通信を行い、離れた場所の情報を手に入れたり、巨大なデータベースにアクセスしたり、大規模な計算はサーバーで実行することができます。これをロボットシステムで実現しようとするのがクラウドロボティクスです。図では緑色で示された「クラウド実装」と示されたところで、必要に応じてインターネットの向こう側のリソースを使うものです。概念はシンプルですが、これを実現するためにはロボット特有の問題を解決し、システムとして実現しなければなりません。ここが私たちのメインの取り組みであり、以下でその詳細を説明します。
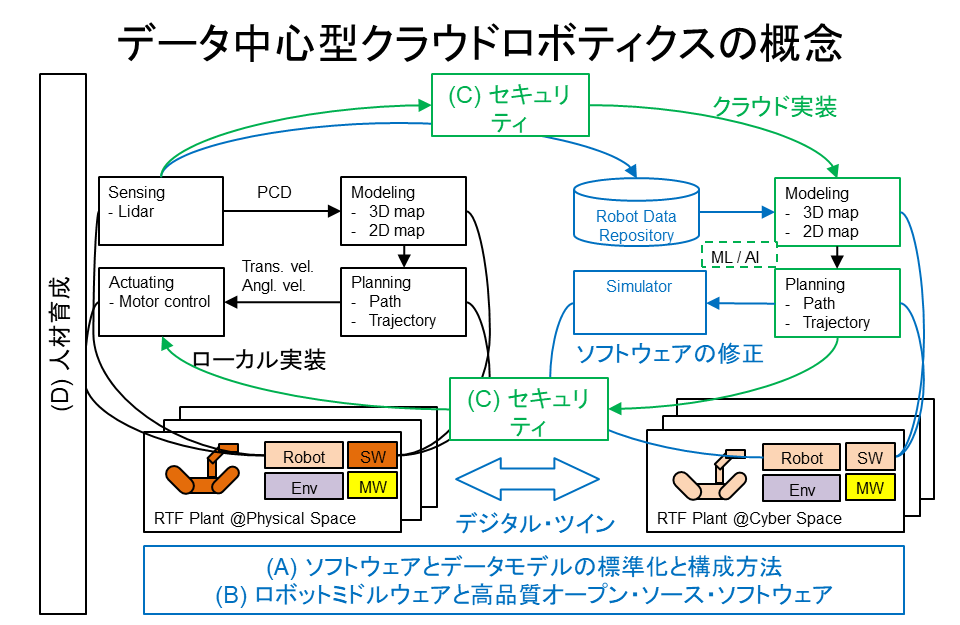 図1:データ中心型クラウドロボティクスの概念図
図1:データ中心型クラウドロボティクスの概念図
(A)ソフトウェアとデータモデルの標準化と構成方法
ロボットのソフトウェアは様々な機能を持った部品から構成されています。図1ではロボットがセンサで外界を計測し、地図を生成し、目的地への経路を計画して、車輪を制御する例を示しています。ローカル実装では、各機能の間のデータ通信は同じコンピュータの内部なので瞬時に終わりますが、クラウド実装ではネットワーク通信の遅延が発生し、ロボットの動作が不安定になってしまいます(時には暴走してしまいます)。
しかし、これからのロボットソフトウェアはどこに配置しても同じように動作すべきです。私たちは、これまでアドホックに開発されてきた、ロボットのソフトウェアとデータの見直しを行っています。そして各機能の境界とその間の通信内容を洗練することで、クラウド実装でも安定して動作するソフトウェア構成に修正しています。さらに、様々なロボットでこの構成が実現できるように、ソフトウェアとデータの標準化活動も行っています。本ページの「クラウドロボティックスの実証と技術」や「クラウドロボティックスによるプラントの遠隔管理」の項で、これらの実例を説明しています。連携企業は、東日本計算センター、日本アドシス、アクアクルー、TIS、ネットワンシステムズです。
(B)ロボットミドルウェアと高品質オープン・ソース・ソフトウェア
ソフトウェアの品質を高めるためには多くのテストを実行する必要がありますが、ロボットではあまり行われていませんでした。なぜならロボットでは環境からの外乱が圧倒的に大きく、すべてをテストするのは困難だからでした。しかし、ロボットを普及させるにはソフトウェアの品質を保障しなければなりません。そこで私たちは、ロボットからのセンサデータやログデータを保存し、解析やテストに使えるようにしています。前節でデータを標準化したことによって、様々なロボットやセンサからのデータ統一的に扱うことができます。これがロボット・データ・レポジトリ(RDR)です。図では青の円筒で描かれています。
従来のソフトウェア開発では実際のロボットを使ったりロボットシミュレータを利用したりしてテストをしていましたが、RDRにより過去の実際のロボットデータが利用できるため、様々なデータを活用したより現実的なテストができるようになります。最終的には実ロボットでテストをしますが、そのデータやログもRDRに取り込めるため、RDRを利用して現実(フィジカル)空間を仮想(サイバー)空間で再現できるようになります。これが図の下に書いてある「デジタル・ツイン」です。私たちは、このようにしてロボットソフトウェアを高品質化し、開発したソフトウェアをオープン・ソース・ソフトウェアとして公開していくことを目指しています。本ページの「ロボット・データ・リポジトリ(Robot Data Repository, RDR)」でRDRについて、「ロボットによる遠隔監視システム」の項でこれらの実例について説明しています。
さらにロボットの実データがあることで、機械学習や人工知能の導入も行いやすくなります。本ページ「WRS2020災害ロボット競技における会津大学の技術」では、画像からの学習を用いた事例が含まれています。連携企業は、アイザック、FSK、日本アドシス、東日本計算センター、会津ラボです。
 RDR:3Dマップの生成と提供
RDR:3Dマップの生成と提供
 RDR:ロボット動作解析のための動画検索システム
RDR:ロボット動作解析のための動画検索システム
(C)セキュリティ
これまでロボットでも安全性=セーフティに関する議論は行われてきましたが、クラウドロボティクスではインターネット通信を利用するため情報セキュリティが重要になります。また、ロボットのハッキングにより物理的な損害を与えることができるため、セーフティとセキュリティは不可分な問題となります。これまではロボットのソフトウェアは接続性や使いやすさが重視されていましたが、これからは今まで以上に安心・安全が重要になってきます。私たちは、ロボットソフトウェア開発におけるセキュリティのガイドラインを作成し、さらに私たちのサービスロボットシステムのハッキングのリスクについて検証を行っています。本ページ「クラウドロボティックスの実証と技術」の中で、セキュリティや通信プロトコルについて説明しています。連携企業はネットワンシステムズ、TIS、日本アドシスです。
(D)人材育成
これまで述べたように新しいロボット技術は、これまでのロボット技術に付け加えて情報工学の比重が大きくなっているため、ロボット技術者がIT技術を習得する機会が必要です。一方で、ソフトウェア技術者がロボットの分野に入ってくるケースも増えましたが、彼らは機械工学・制御工学・電気工学の経験が少く、その技術の習得が必要です。そのため情報工学と機械・制御・電気工学をつないだ、新しいロボット分野をカバーする人材が必要です。私たちはこの分野をソフトウェアとハードウェアに跨っているのでデュアルウェアと名付け、新しい講習会を実施しています。その他にもシミュレーションなども行っています。本ページ「ロボット人材育成」で我々の人材育成事業を説明しています。連携企業はFSKです。
 デュアルウェア講習会II
デュアルウェア講習会II
 ロボットシミュレータChoreonoid講習会
ロボットシミュレータChoreonoid講習会
 会津大学ロボット教材
会津大学ロボット教材
お問い合わせ
会津大学企画連携課
電話:0242-37-2511
Email:cl-innov@u-aizu.ac.jp