
INDEX
はじめに
会津大学 理事(産学連携担当)
岩瀬 次郎
皆さんこんにちは。
会津大学の産学連携を担当しております理事の岩瀬です。
会津大学のロボット事業は、浜通りの復興を目指すイノベーションコースト構想の一環として、2015年から開始されました。ステージ 1 の3年間では「ロボットソフトウェアの標準化」と「産学連携体制の構築」を行いました。ステージ 2では、 「ロボットにおけるデータの活用」と「産学連携体制の拡充」を推進しました。
今期のステージ3ではメインテーマを「先端ICT×ロボット」として、会津大の持つAI、データベース、データ解析、シミュレーションなど先端ICT技術とロボット技術の統合を行います。人・物に触らないタッチレス技術、サイバーフィジィカルとしてサイバー空間の活用、安全安心なロボットのためのサイバーセキュリティも研究テーマです。産学連携では、FA(Factory Automation)分野への応用も視野に、県内企業の競争力・開発力の強化から事業化を推進します。2018ワールドロボットサミット(WRS)シミュレーション部門での優勝に続き、昨年のWRSでは災害対応標準性能評価部門とトンネル事故災害対応・復旧部門で共に3位となりました。大学初の学外拠点として2019年に南相馬市の福島ロボットテストフィールド(RTF)に開所した「会津大学RTF研究センター」では、RTF施設を活用した実証研究に取り組んでいます。
ロボット技術開発を通じた技術者の育成はもとより、継続採択された国の「復興知事業」により浜通りでの高校生など若い方へのロボット技術やプログラミング研修も実施し、昨年度ではのべ約250人に受講いただいております。
開発者のコミュニティとして、会津ロボットデュアルウェア研究会は15社、約200人の技術者に参加いただき、学生の参加も約100人に及んでいます。ロボットソフトウェアの開発コミュニティとしては日本最大です。先端ICTラボにあるソフトウェアライブラリふくしまに登録されたソフトウェア部品も145個に及びます。これらは機能別に格納され、オープンソースとしてお使いいただけます。
今回のロボットシンポジウムは福島県商工労働部次世代産業課の主催する「ふくしまロボット産業推進協議会 ロボット・ソフトウェア検討会」との共催として開催し、企業、自治体などの皆様との協業による会津大学のロボット事業の成果をなるべくわかりやすく紹介いたします。本格化するイノベーションコースト構想のロボット領域において、RTFも活用し、ICTによるロボット、ふくしまブランドのロボット開発を推進します。引き続き皆様のご支援、協業の程よろしくお願いいたします。
【合同開催】令和4年度ロボット・ソフトウェア検討会
第7回会津大学ロボットシンポジウムは、ふくしまロボット産業推進協議会主催の「令和4年度ロボット・ソフトウェア検討会」と合同開催形式とし、下記の内容で行われる。
日程:2022年6月28日(火) 14:00~15:45 ※このセミナーは終了しています
場所:オンライン形式 ※下記URL
内容
14:00-14:05 挨拶及び活動方針の説明(会津大学特任教授 屋代 眞)
14:05-14:20 会津大学2021年度バーチャルロボットシンポジウム紹介(会津大学特任教授 屋代 眞)
14:20-15:30 パネルディスカッション
テーマ「ロボット・ソフトウェアの最新の動向と今後の方向性」
◎モデレータ:会津大学 成瀬継太郎 教授
◎パネリスト:・国立研究開発法人産業技術総合研究所インダストリアルCPS 研究センター
安藤慶昭 副研究センター長
・名城大学 大原賢一 教授
・パナソニック株式会社 ロボティクス推進室開発二課
グエン・ジュイヒン マネージャー
15:30-15:45 情報交換・フリーディスカッション
令和4年度ロボット・ソフトウェア検討会の様子
2021年度プロジェクト概要
プロジェクトリーダー
成瀬 継太郎 教授
【背景・動機】
従来のロボットシステムは図2の物理空間にある移動ロボットが1台からなるもので、単体ロボットが地図生成、経路計画、ナビゲーションをすべて行っていました。
しかしロボットの作業空間が大きくなり、また要求されるタスクが増えると、複数台のロボットが連携して動くことが望まれます。するとロボット間での地図の共有が必要になります。
さらにオフィスロボットでは人間と同じ作業空間にいるため、テーブルやイスの位置が変化することがありますが、このときはロボットは作業を中断して地図を作り直し、再び経路計画を行い、ナビゲーションを再開します。
一方、作業空間に監視カメラがあるときは、カメラがテーブルやイスの位置の変化を検出することができます。
移動ロボットと監視カメラが連携してビルディング全体をシステムとすることで、ロボット単体ではできないことを可能にするスマートシステムが期待されます。我々はこれを目指しています。
 図1:プロジェクト全体図
図1:プロジェクト全体図
【システム構成:Cyber-Physical System】
我々のシステムは以下の様に構成しています。
- ロボット・監視カメラ・経路計画器が地図を共有できるように、レイヤ型の地図のデータ構成を採用した。
- 地図データはRobot Data Repository (RDR)に保存し、各モジュールが必要な時にデータを取得できるようにした。
- 仮想空間として、物理空間と同じ作業環境をシミュレータ内に構築し、ロボットの経路を事前に仮想空間で検証できるようにした。
このシステムは仮想(Cyber)空間と物理(Physical)空間で密接に連携した構成になり、Cyber-Physical System (CPS) と呼ばれています。
とくに複数台移動ロボットの場合は、シミュレータで事前経路を検証することで以下が期待できます。
- 経路計画ではロボットの移動時間が正確に予測でき、待ち時間の少ないナビゲーションが実現できる。
- より効率的なロボットの待ち合わせが決定でき、システムのスループット向上する。
統合デモストレーション
【統合デモ動画の概略】
動画にある統合デモでは、我々のCPSの取り組みを示しています。会津大学にあるLICTiAという建物の1階のオープンスペースにおいて以下のシステムを構成しています。
物理空間
- 2台の移動ロボットとナビシステム
- 2台のロボットのための経路計画器
- 4台の天井カメラと物体認識
- 位置推定システム
- データを保存するRDR
仮想空間
- オープンスペースと移動ロボットのシミュレーションモデル
- 物理空間のロボットと同一のナビシステム
我々はこれからも研究開発を続け、物理空間と仮想空間がより密接に連携したシステムを実現し、先進的なスマートシステムを開発していきます。
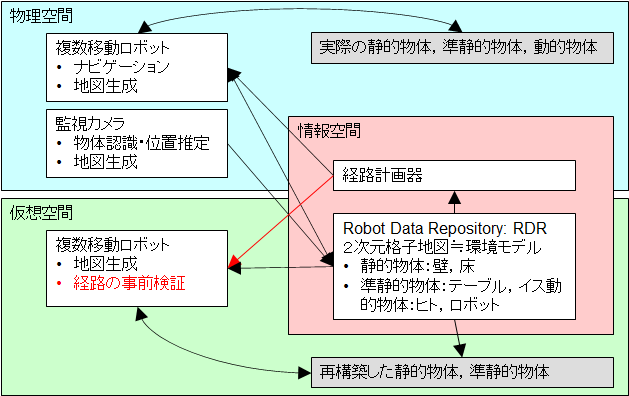 図2:統合デモでのCyber-Physical Systemの概念図
図2:統合デモでのCyber-Physical Systemの概念図
産学連携研究報告【各教員・研究員別テーマ】
渡部 有隆 上級准教授
キーワード:RDR(ロボットデータリポジトリ)
「クラウドロボティクスにおける物体認識」 PDF
矢口 勇一 上級准教授
キーワード:運行管理、セキュリティ、デジタル田園都市構想
「CPSの実装に向けた取り組み Digital Garden CityとAdvanced Air Mobility」 PDF
中村 啓太 准教授
キーワード:立体復元、性能評価、画像認識
「R3年度研究成果報告」 PDF
山田 竜平 准教授
キーワード:自律移動、地図生成、ナビゲーション
「極限環境へ適用可能なロボット技術研究 2021」 PDF
吉野 大志 研究員(2022年3月まで)
キーワード:通信、ネットワーク、プロトコル、ミドルウェア、メッセージングシステム、IoT、IoRT
「2021年度研究成果報告」 PDF
Akila Siriweera 研究員
キーワード:通信、ネットワーク、セキュリティ、ブロックチェーン、スマートシティ、IoE、Society 5.0
「Technical Report- Cloud-Robotics Research: Extending the Extended Crosschain of Blockchains (ECB) to Internet of Crosschains (IoC) and Internet of Robotics Blockchains」 PDF
Isuru Jayarathne 研究員
キーワード:地図生成、シミュレーション、コレオノイド
「3D Point Cloud Map Generation with Choreonoid」 PDF
産学連携プロジェクト報告【各企業別テーマ】
会津大学ロボットクラスターでは、上記「産学連携ロボット研究開発支援事業」の他、2018年度から(公財)福島イノベーション・コースト構想推進機構の補助事業「大学等の「復興知」を活用した人材育成基盤構築事業」(=復興知事業)により、南相馬市などとの連携を図りながら、若手のロボット・ICT人材育成に取り組んできた。
実際には、Pythonなどの言語を使用したプログラミングの演習や実際のロボットを操縦する操作訓練などの講習会をメインに、地元企業やベンチャー企業の見学なども行っている。
同時に浜通りの研究機関とも協力して、南相馬を基盤としたコミュニティをつくり、復興を超えて福島県の未来を創り出すことを目指している。
◎2021年度の復興知事業 まとめはこちら https://rtc-fukushima.jp/column/5474/
2021年度まとめ
プロジェクトリーダー
屋代 眞
2021年度はステージIIIの初年度として、実際にロボットが動く実空間とICTによってつくられるシミュレータの世界などを含む仮想空間とにおけるデータ共有や通信など、実空間と仮想空間を統合した"Deal-Space Robotics"の基礎的な技術の研究開発と実証を産学連携で進めてきた。会津大学ではこのような研究を福島県を中心とした14の企業等とARDuC(Aizu Robotics Dual-ware Community)というコミュニティを作り、定期的に情報交換を行いながら共同研究として進めている。全体が連携したひとつのプロジェクトとなっているが、本シンポジウムではそれぞれの大学の研究者および委託研究を行っている企業ごとに2021年度の成果をまとめて報告することにした。ここで紹介した技術により、より高度なロボット制御が可能になり、より早くて質の高いロボット開発が可能になる。また、個々の技術は今後発展していくロボット産業につながるだけではなく、IoTやインフラなどを含むこれからのICT技術の主要な要素になると思われる。今後も"Deal-SpaceRobotics"の技術をさらに発展させICTの新たな基盤づくりとともに、ロボット産業や人材の育成に貢献していきたい。
ARDuC(会津ロボットデュアルウェア研究会)について
2015年「RTC開発者全体会議」と称した、プロジェクトに関連する企業との情報交換会を開始した。2016年には、「RTCライブラリふくしま研究会」へと改称し、各プロジェクトの成果報告のほか視察会、講師を招聘しての勉強会などを毎月開催している。 現在は、名称を「会津ロボットデュアルウェア研究会(ARDuC=アーダック)」とし、協力企業13社と国立研究開発法人産業技術総合研究所を含めた15団体の合計59名(2022年4月現在)が所属しています。
【企業・団体】
株式会社アイザック、株式会社会津ラボ、株式会社東日本計算センター、
株式会社NTTデータNJK、株式会社FSK、ネットワンシステムズ株式会社、
株式会社日本アドシス、アクアクルー株式会社、株式会社メカテック、
TIS株式会社、福島コンピューターシステム株式会社、株式会社GClue、
株式会社コレオノイド、国立研究開発法人産業技術総合研究所、
公立大学法人会津大学